需要对零部件进行精准定位,使工业机器人将零部件准确放置到对应位置。通常情况下,工业机器人需要预编程好零件运动方案。但是在许多装配应用中,零件公差的叠加会导致各种偏差,从而使机器人难以进行有效的自动化装配工作。
需要对零部件进行精准定位,使工业机器人将零部件准确放置到对应位置。通常情况下,工业机器人需要预编程好零件运动方案。但是在许多装配应用中,零件公差的叠加会导致各种偏差,从而使机器人难以进行有效的自动化装配工作。
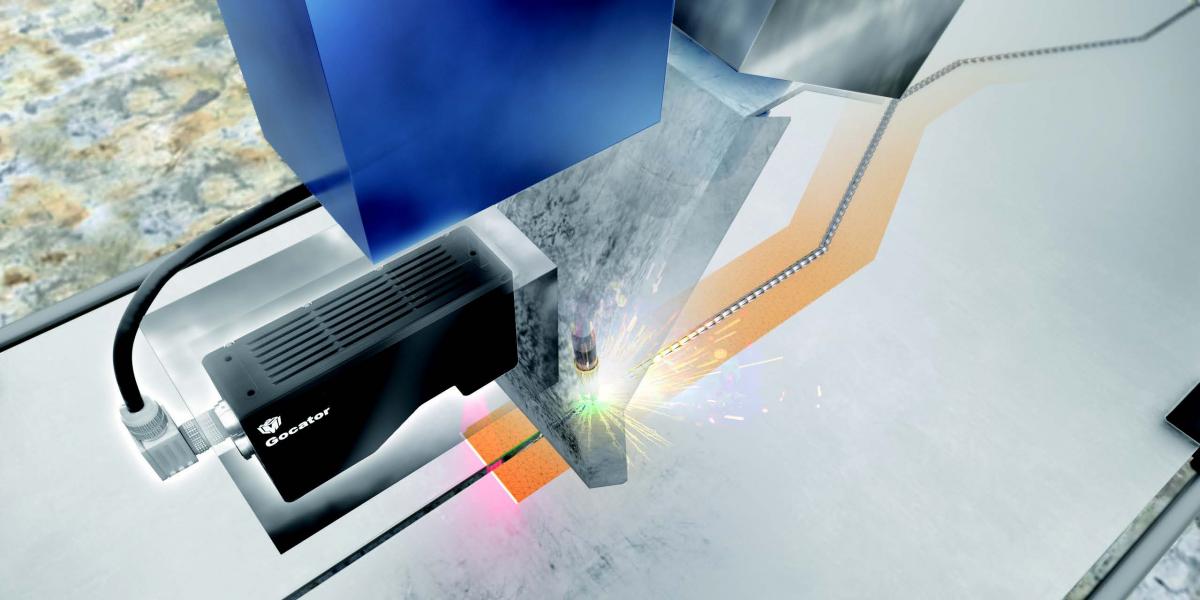
3D视觉弧焊机器人
在自动化弧焊应用中,精确编程的机器人会遵循焊接路径,路径中的焊接位置和焊接角度都根据工件设定的精密机械公差进行设定。为进行高质量焊接,工件和固定装置要避免任何机械偏差,并且保证所有焊缝100%准确。此方式最大的挑战是要在长时间可持续生产高质量焊件过程中,符合严格公差要求。
智能3D解决方案
Gocator三维智能传感器使用非接触式的线激光轮廓扫描技术,紧凑的设计使其适用于小型工作区域。通过3D智能传感器准确地定位机器人以进行初始设置,通过以太网轻松与机器人控制器集成,拥有最大程度的灵活性,为机器人提供三维视觉引导。不仅简化了零件固定,而且改善了焊接定位,从而提高焊接质量。
另外,Gocator传感器的内置控制器和算法将信号转化为校准的数字化数据,并确定焊缝的当前位置。找到焊缝位置后,位置信息会被直接传输到机器人控制器中。机器人便可以根据当前位置校正运动,每一次都是完美焊接。通过此闭环系统功能,提高焊接质量并最大程度降低返工、修正和报废成本。
此机器人三维视觉引导系统可处理例如内圆角或对焊等焊缝问题。机器人根据参数例如接口类型和平面厚度进行校准。在执行搜索时,会将焊缝上的点定义成2D或3D。
电弧焊环境恶劣,执行焊接操作时会产生焊渣和烟尘。为保护在实际焊接中的传感器,IP67防护等级的铝制外壳保证传感器免受潮气、灰尘和振动的影响。标准的冷却和空气净化系统进一步增强了其在恶劣环境中的实用性,以保证传感器最佳性能和可靠性。
智能3D的实际应用:车门铰链焊接
八个激光引导系统精确定位八个焊缝路径的位置,并引导机器人弧焊车门铰链到车身的点焊操作。这些系统均由Gocator3D传感器进行驱动,引导机器人在不到1秒的搜索时间内准确定位到车门铰链。机器人基于3D位置信息,将焊嘴定位到准确的位置点,搜索精度达到±0.1毫米。三维智能传感器通过其内置的工具和通信协议,为机器人装配应用提供视觉引导。
案例分享:飞机部件装配中的铆钉孔检测
大型产品尺寸,复杂的连接过程以及正确装配给飞机生产带来不同技术挑战,既要克服挑战,又要实施严格的关键公差和管理小批量尺寸。通常情况下,很难在控制成本并在高效率的情况下实现。
操作员面临的最大挑战是,他们需要在飞机后部组装中安装压力舱壁,在协同工作的位置不符合人体工程学且不合理的情况,必须保持严格的装配质量标准。
3D检测解决方案
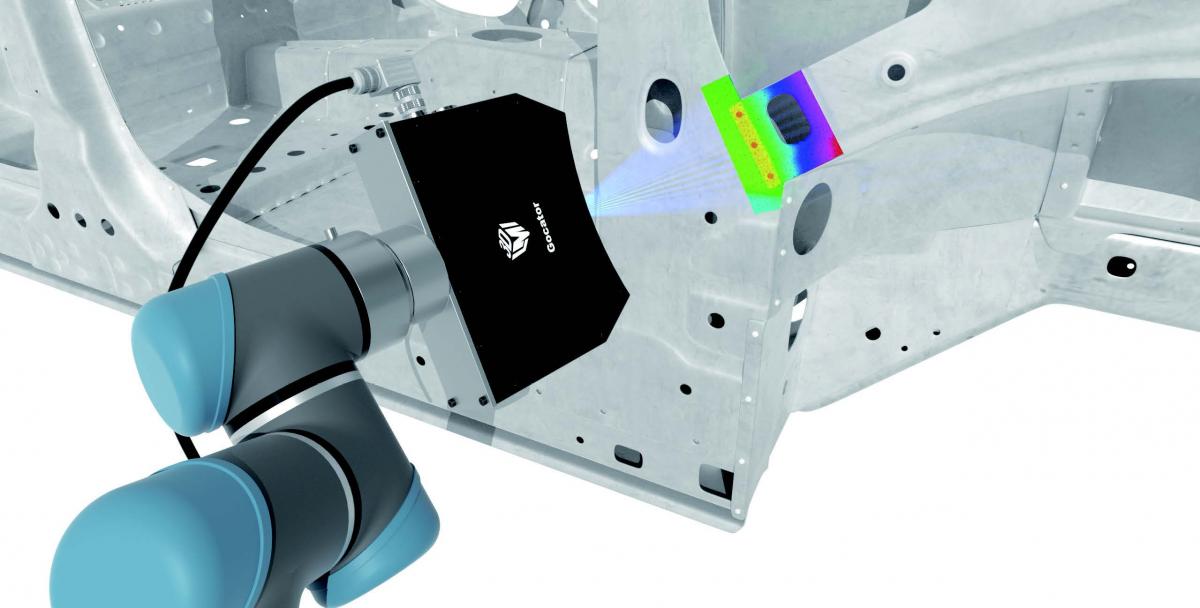
ZeMAgGmbh设计了一种半自动化方法来优化飞机部件装配。通过创新的铆钉铆接工艺,实现人机协作与直观的人机交互操作相结合。ZeMA解决方案是利用人与机器人之间的协作,更有效地完成任务。首先,将机器人放置在腔管内,然后将机器人的工作空间安装在提升装置的顶部扩展,使其能够将砧座正确定位在舱壁前方。同时,人类执行更复杂的任务,插入铆钉并从分段筒外操作铆锤。
为了创建此应用中使用的机器人系统,Gocator®3D激光线轮廓传感器使用内置手眼校准安装并校准到机器人。然后,传感器能够提供每个测量点的3D坐标,借助板载数据处理和内置测量工具,Gocator®可检测飞机机架或外壳孔,从而以最高的精度和效率完成铆接过程。铆接过程中通过手动和机器人来执行任务。操作员检测指定的孔,插入铆钉和定位铆钉并通过启动铆锤开始协作。
“我们之所以选择LMI的智能传感器,因为它可以非常快速灵活地集成到机器人中,并实现板载数据处理,这对于快速实施研究和可行性研究是一个很大的优势。除了板载数据处理之外,访问传感器原始数据对我们来说也是一个重要因素。总而言之,Gocator®三维智能传感器被完美地应用于研究和工业应用。”TobiasMasiak,ZeMAgGmbH机器人和人机交互方向研究助理说道。
结论
运用Gocator®激光线轮廓传感器进行测量和检测,测量目标物之间的距离取决于智能传感器的测量精度,机器人定位以及工具校准。由于自动化这个复杂的过程,装配误差和偏差被大大地减少。
下一步
我们对该解决方案进行改进,包括对开发的过程工具和集成机器人系统进行长期压力测试。此外,系列测试还包括从Gocator®、相机、扭力测试以及操作员体验中获取的信息综合起来的数据进行质量检测。将数据与人工智能算法相结合将在未来得到更多应用。
感谢乐姆迈(上海)贸易有限公司提供本文内容。
 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录