为了检测作业对象及环境或机器人与它们的关系,在机器人上通常安装了触觉传感器、视觉传感器、力觉传感器、接近觉传感器、超声波传感器和听觉传感器,大大改善了机器人工作状况,使其能够更充分地完成复杂的工作。由于外部传感器为集多种学科于一身的产品,有些方面还在探索之中,随着外部传感器的进一步完善,机器人的功能越来越强大,将在许多领域为人类做出更大贡献。
1.一般触觉传感器
一般触觉传感器只用于感受有无接触,实际上是对正压力敏感的传感器。
触觉传感器应具有以下特征:
①空间分辨率为1-2mm;
②阵列尺寸为每个指尖有 个接触敏感点(人的指
尖有个接触敏感点);
③每个力敏元件的阀值灵敏度为 ;
④稳定性、线性度和重复性好;
⑤采取样率 ;
⑥价廉、结实、类似皮肤。
图1 机械手常用的机械开关型触觉传感器
(1)机械开关
如图1所示是机械手常用的机械开关型触觉传感器。当外力P超过某一临界值时,球形罩塌陷(咔嗒声),外力消失,罩又恢复它的形状,用球形罩制成的触觉传感器,增压流体或气体给开关施加背压,从而调整开关阀值。金属薄片为全部开关的一个共用电极连线,当压力超过阀值,球形罩塌陷,形成两个电极相连的回路。
(2)压阻
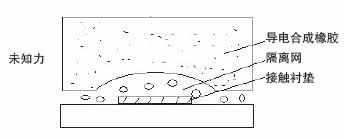
导电合成橡胶是在硅橡胶中加导电颗粒或半导体材料(如银或碳)构成的导电材料。这种导电橡胶,加压时其体电阻的变化很小,但接触面积和接触电阻都睡外力大小而变化。隔离器为用尼龙材料编织的网,未加力时,无接触点,电阻为无穷大(图2)。
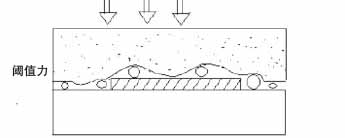
如图3所示,在一定阀值力的作用下,导电合成橡胶因隔离器被压扁,电阻减小。
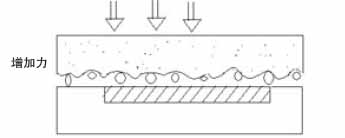
如图4所示,增大压力,接触面积增大,电阻进一步减小。
(3)碳毡和碳纤维
碳毡传感器是在两个极板间加入碳毡或碳纤维,从而构成压阻传感器。当负载增加,碳纤维被挤压,导致更多的电接触,使电阻减小。
(4)磁阻
在霍尔效应作用下,流过半导体的载流小,当磁阻强度增大时,偏移现象严重,导致其电阻受外磁场的影响,这就是磁阻效应。如图5所示为磁阻式触觉传感器。
磁阻式触觉传感器在硅橡胶中,放置磁偶极子阵列,每个磁偶极子下放置有四个铍莫合金磁阻传感器。铍莫合金是含19%铁和81%镍的合金,有很强的磁阻效应。当外加载荷时,橡胶发生变形,磁偶极子靠近传感器,磁感发生变化,磁阻传感器检测到信号。
图2 未加力时的导电合成橡胶
图3 在一定阀值力的作用下的导电合成橡胶
图4 增大压力时的导电合成橡胶
图5 磁阻式触觉传感器
图6 柔性薄层触觉传感器
图7 腕力传感器
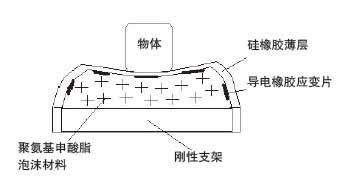
2.柔性触觉传感器
柔性聚氨基甲酸酯泡沫材料可用于设计柔性触觉传感器。如图6所示,泡沫材料用硅橡胶薄层覆盖,导电橡胶应变计置于薄层下面,变形时,导电橡胶发生拉伸或压缩变形。
3.腕力传感器
腕力传感器安装在机器人末端和末端执行器之间,用于测量三维力和力矩。图7所示为腕力传感器,它通常比较小,两面为连接法兰,为整体铝材制造。典型的腕力传感器为直径 100mm,厚30mm,重340g。
4.超声波传感器
超声波传感器是利用超声波的特性,实现自动检测的测量元件。声波是一种机械波。声的发生是由于发声体的机械振动,引起周围弹性介质中质点的振动由近及远的传播,这就是声波。人耳所能听闻的声波其频率在20-20 000 Hz之间,频率在20-20000 Hz以外的声波不能引起声音的感觉。频率超过20 000 Hz的叫做超声波,频率低于20 Hz的叫做次声波。超声波的频率可以高达1011 Hz,而次声波的频率可以低达10-8 Hz。
1)压电式超声波发生器
压电式超声波发生器就是利用压电晶体的电致伸缩现象制成的。常用的压电材料为石英晶体、压电陶瓷锆钛酸铅等。在压电材料切片上施加交变电压,使它产生电致伸缩振动,而产生超声波。
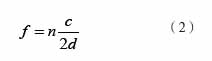
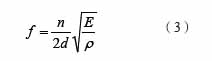
压电材料的固有频率与晶体片厚度d有关,即
式中,n=1,2,3,…是谐波的级数;c为波在压电材料里的传播速度(纵波);
式中,E为杨氏模量; 为压电材料的密度。
对于石英晶体
E=7.70×1010N/m
ρ = 2654kg/m3
对于锆钛酸铅
E=8.300×1010N/m
ρ = 7400kg/m3
因此,压电材料的固有频率为
根据共振原理,当外加交变电压频率等于晶片的固有频率时,产生共振,这时产生的超声波最强。压电式超声波发生器可以产生几十kHz到几十MHz的高频超声波,其声强可达几十W/cm2。
2)磁致伸缩超声波发生器
铁磁性物质在交变的磁场中,在顺着磁场方向产生伸缩的现象,叫做磁致伸缩效应。
磁致伸缩效应的大小,即伸长缩短的程度,不同的铁磁物质其情况不相同。镍的磁致伸缩效应最大,它在一切磁场中都是缩短的。如果先加一定的直流磁场,再加以交流电时,它可工作在特性最好的区域。
磁致伸缩超声波发生器把铁磁材料置于交变磁场中,使它产生机械尺寸的交替变化,即机械振动,从而产生超声波。
磁致伸缩超声波发生器是用厚度为0.1-0.4 mm的镍片叠加而成的,片间绝缘以减少涡流电流损失。其结构形状有矩形、窗口形等,如图8所示。
超声波发生器的机械振动固有频率的表达式与压电式的相同,即
如果振动器是自由的,则n=l,2,3,…,如果
振动器的中间部分固定,则n=1,3,5,…。
磁致伸缩超声波发生器的材料,除镍外,还有铁钻钒合金(铁49 %,钴49 %,钒2 %)和含锌、镍的铁氧体。
磁致伸缩超声波发生器只能用在几万Hz的频率范围以内,但功率可达十万W,声强可达几千W/cm2,能耐较高的温度。
为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。可以利用超声波传感器来设计三方向(前、左、右)的超声波测距电路,为机器人了解其前方、左侧和右侧的环境提供一个运动距离信息。
在机器人控制系统中,可用时间差测距法进行距离的测量,具体原理是:超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340 m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离s,即:
s = 340t / 2 (5)
 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录