 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



走进位于荷兰的Tosec BV公司,你会看到许多定制金属加工厂的典型场景,耳边传来等离子切割台、激光切割机和焊接电弧的嗡鸣,但若继续深入厂房,便会逐渐意识到这并非普通的加工车间。
一台机器人正将工件送入去毛刺机。零件分拣系统运用双机械臂抓取切割毛坯,并将其分类归入独特的塔式仓储架。打磨与清渣机器人将繁重的板材边缘精加工流程自动化,尤为引人注目的是,机械臂末端执行器抓握着传统直角磨削工具,而摄像头则实时监控着整个工作单元。
更值得注意的是这些自动化单元上的标识——艺术化的字母“T”,这正是Tosec及其母公司Tollenaar Industries的商标。作为家族企业,Tollenaar的业务遍及荷兰、德国和南非。通过旗下Teqram子公司,Tollenaar工业集团开发出基于视觉识别的自动化系统,专为定制加工商及类似多品种生产场景量身打造。
贯穿该公司几乎所有自动化项目的共通之处在于:你绝不会看到任何手动编程或操作员使用示教器的场景,取而代之的是由人工智能(AI)驱动的视觉技术引导的自动化。
始于视觉
Teqram公司的销售总监Frans Tollenaar,与其兄弟、首席技术官Roland Tollenaar,共同指向一台名为EasyGrinder的视觉引导机器人。它正在处理等离子切割板材的边缘加工。其末端执行器并未配备专用磨头,而是采用了市面上常见的直角磨光机——这种原本为人工操作设计的标准工具配备了常规磨片。
机器人使用凿子清除厚板上的熔渣,这是人工操作中也会使用的同款手动工具
Frans解释道:“我们选择手动工具是经过深思熟虑的,主要是因为它们能实现丰富的加工工艺。曾有像3M这样的公司前来考察,他们对我们在磨具上实现的卓越性能感到惊讶——因为我们将这些工具运用到了极致。”
三大要素构成该工作单元
该系统得以实现主要依靠三大要素。首先是视觉技术,它消除了阻碍高混合、小批量生产场景实现自动化的常见障碍:机器人编程。Frans指向打磨单元上方的摄像头——EasyEye。该设备集成了飞行时间激光测距传感器与高光学变焦镜头。

手动打磨工具通过铰接机构安装在机器人末端执行器上,该机构作为配重平衡装置,专为优化特定工具的工作压力而设计
“这台摄像头生成三维坐标,并将其与捕捉到的像素点关联,”他解释道,“本质上它提供了空间像素坐标,我们借此运用视觉算法精准判定机器人所需执行的动作,集成在机器人末端的扫描器则提供细节视角以及精确加工所需的各类信息。”
机器人一旦识别出具体工件,便需提取待加工特征。此时,专用应用逻辑开始发挥作用。如果机器人“看到”特定工件特征组合,就会自动选择对应工具以处理这些特征。
“我们的目标是让技术像人类一样工作,”Frans说,“就像你给工人一批零件并指示‘请打磨这些零件并加工出边缘圆角’。我们只需给出简单指令,机器人就能自主完成任务。”
关于定位技术
Frans接着指向单元内的工作台EasyFlipper,这个蛤壳式装置在机器人作业时呈开启状态,通过强磁力固定板材。当机器人完成单面加工后,蛤壳闭合并翻转工件。
这项技术实现了此类多品种自动化的第二关键要素:无需人工干预的简易、灵活夹具系统。再次强调,这是典型的多品种生产环境,每个零件都可能各不相同。如果操作员在每个打磨周期后都必须进入单元重新调整夹具,自动化价值将大打折扣。
关于压力控制
手动工具的设计原本是基于人体工程学考量。这意味着它们需要以特定角度和压力作用于工件,并非为机器人设计而生。那么,机器人如何在不依赖编程的情况下自适应操作?
为解释这一原理,Frans指向末端执行器突出的铰接部件——这是一个配重块。“我们为此申请了专利。通过配重块施加精确压力,并借助编码器读取角度数据。”软件系统综合视觉数据、各工具专属的工艺逻辑、配重参数及编码器读数,动态调整压力、进给速度和转速以完成零件加工。

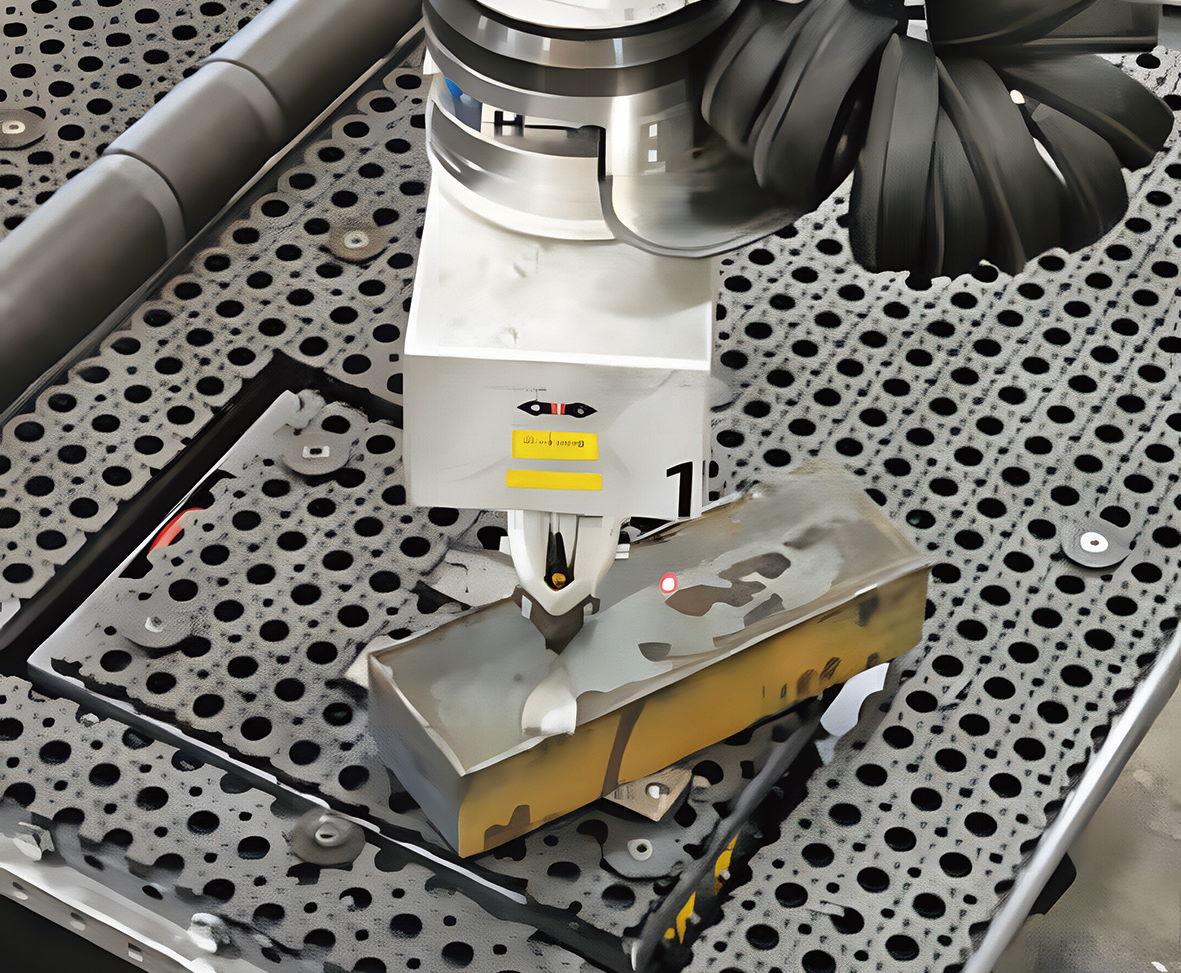
机器人垂直定位直角磨光机,对热切割过程产生的热影响区进行加工,在此配置下,弹簧机构有助于保持最佳压力
“以机器人水平握持砂轮盘的操作场景为例,打磨盘角度可在0-30°间变化。我们通过优化配重设计,确保工具在不同切入角度下都能保持精准压力。”
针对垂直状态工具的操作——例如使用直角磨光机对板材上边缘进行圆角加工时,则通过独立的弹簧机构实现精确压力控制。
切割、校平与去毛刺
如今,Teqram在距Tosec一个街区外的工业区设立了广阔的研发中心。该中心内成排的机器人和多个测试区域,正为各类工业应用验证柔性自动化方案。
此处仍扎根于定制金属制造领域。走回Tosec车间,你能看到众多概念的实际应用。“我们开发了自动化卸料系统,机械臂可抓取重达1300磅的零件,”Frans介绍道,“操作界面非常直观,系统会询问操作员希望按项目还是下游工序需求等方式进行零件分组。”
该系统虽无法处理所有切割轮廓,但机器人能灵活抓取复杂型材,并在判定零件卡滞需人工处理前进行多次尝试;若失败则自动转至下一零件。“系统高度依赖切割效果,”Frans强调,“需要足够宽的切缝和充分的零件间隙以保证稳定分离。尽管如此,系统仍设计为可处理多种尺寸零件——既能抓取微型嵌套的小工件,在某些安装场景中(Tosec未采用)还可通过起重设备搬运占据大半个切割台的巨型毛坯。”
沿生产线继续前行,会看到机器人向去毛刺机供料,Teqram也为校平系统开发了类似技术。在校平工序中,视觉技术更发挥着多维作用:识别机械臂抓取的零件、监测板材翻转进行二次加工的过程,还能测量最终平整度并按结果分类——合格品与废料分别放置于不同托盘。
向去毛刺机供料时,机器人可将多个零件并排放置于传送带上。视觉系统同时监控去毛刺后的卸料站,当出现堆积时会自动减速或暂停作业直至瓶颈消除。“就像人工操作那样自然。”Frans如此描述。
突破制约的自动化
现代金属加工设备已实现卓越产能,但越是高效的生产环节,越容易加剧下游瓶颈——而这些瓶颈工序往往正是手工作业。即便在当今最自动化的加工厂中,仍存在“人工孤岛”:激光切割可彻夜无人值守,但次日清晨工人仍需分拣数百个切割毛坯,并手动将其送入去毛刺机甚至校平机。
正如Tosec所采用、Teqram所开发的自动化方案所展示的,视觉与人工智能技术展现出巨大潜力——即使对产品种类最繁杂的加工车间也是如此。随着创新持续推进,这些“人工孤岛”终将逐渐消失。
作者:Tim Heston
来源:荣格-《国际金属加工商情》
原创声明:
本站所有原创内容未经允许,禁止任何网站、微信公众号等平台等机构转载、摘抄,否则荣格工业传媒保留追责权利。任何此前未经允许,已经转载本站原创文章的平台,请立即删除相关文章。


