 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



研究背景
柔性弯曲传感器在机器人、人机交互、医疗康复等领域需求迫切,但现有基于有机材料(碳基复合材料、导电弹性体等)的传感器存在固有缺陷:粘弹性导致信号漂移、长期循环弯曲后易失效,且机械强度不足,难以承受大应力和高频次形变,限制了实际应用。而无机硅(Si)虽具备高灵敏度和弹性响应,但传统集成方式(粘合剂、导电浆料)易导致基板脆弱、连接不可靠,无法发挥其性能优势。
第一作者 Hao Liu
通讯作者 Seiichi Takamatsu
通讯单位 东京大学精密工程系;纽约州立大学宾汉姆顿分校系统科学与工业工程学院;曼彻斯特大学机械、航空与土木工程系等
DOI 号 https://doi.org/10.1038/s41528-025-00498-1
研究亮点
创新结构设计:采用 5μm 超薄单晶硅应变片( piezoresistive 层 150nm)作为传感核心,搭配 5μm 高韧性聚酰亚胺(PI)基板,通过水蒸气等离子体辅助(WVPA)键合技术实现 Au-Au 直接连接,无粘合剂和导电浆料,避免粘弹性带来的信号漂移;
性能突破:可承受 10 万 + 次 5mm 半径弯曲循环,信号稳定无衰减;最小弯曲半径仅 0.4mm,机械极限达 300MPa,工作应力≤94MPa(应变 <3%);灵敏度系数 0.08 (1/mm⁻¹),线性度 R²>0.997, gauge factor(GF)35 左右;
环境适应性强:在 0-100℃温度、20%-90% 湿度范围内性能稳定,湿度导致的电阻变化仅 0.16%,温度影响可通过校准补偿;
批量制备兼容:基于 SOI 晶圆和 MEMS 工艺,4 英寸晶圆可产出 250 + 个 Si 应变片,键合和转移流程适配低成本大面积加工。
应用场景
机器人领域:集成于机械手指关节,实时监测弯曲角度,辅助抓取不同尺寸物体(杯子、马克笔等),耐受高频次开合循环;
人机交互(HMI):用于可穿戴设备的运动捕捉,精准识别肢体关节形变;
医疗康复:监测人体关节活动或器官微小形变,提供稳定的长期监测数据;
工业自动化:适用于复杂工况下的设备形变监测,耐受机械应力和环境波动。
一句话概括
东京大学团队开发的 “10 万 + 循环耐用弯曲传感器(100k+ CRBS)”,通过超薄 Si 应变片、WVPA 直接键合技术与 PI 基板的协同设计,解决了传统传感器寿命短、信号漂移的痛点,实现高弹性、高线性度和强环境适应性,为机器人精准感知与人机交互提供可靠方案。
图文解读
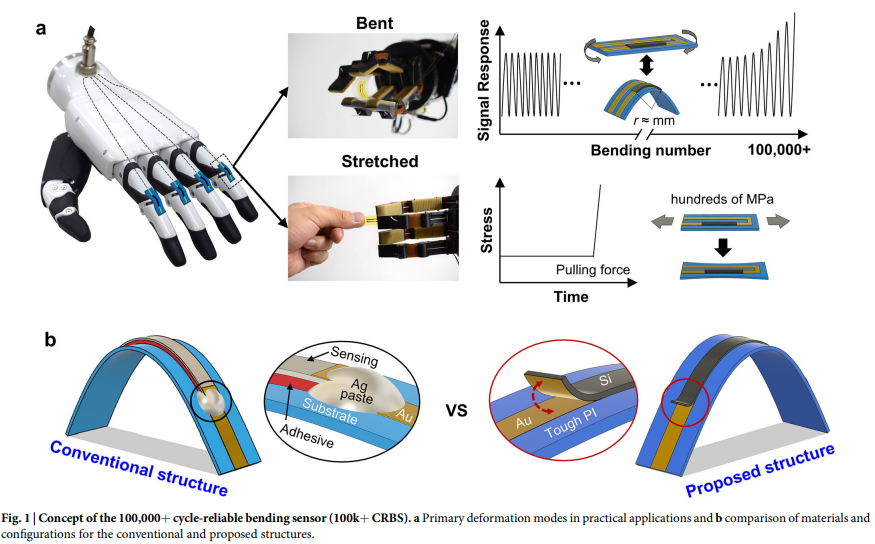
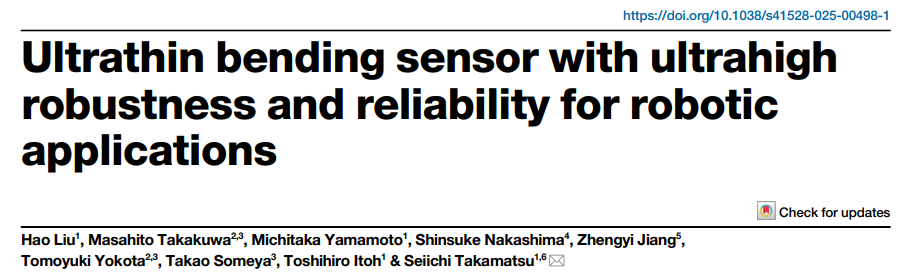
图 1:传感器概念与结构对比
核心:左侧明确传感器的两大应用形变(拉伸 / 压缩、弯曲)及 10 万 + 循环的核心目标;右侧对比传统结构(粘合剂 + 导电浆料)与本研究结构(WVPA 键合 + Si 应变片 + PI 基板),凸显无粘弹性连接的优势;
关键:点出传统结构的失效根源(粘合剂分子链重排、导电浆料微裂纹),为本研究的结构创新提供依据。
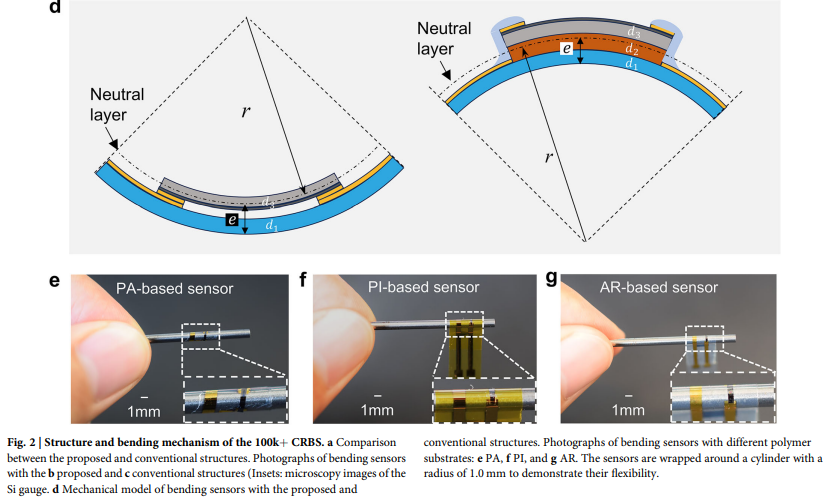
图 2:传感器结构与弯曲机制
核心:展示传感器分层结构(Si 应变片 + PI 基板 + Au 布线),及 PA、PI、AR 三种基板的柔性验证(可贴合 1mm 半径圆柱);
关键:通过力学模型推导弯曲半径与电阻变化的关系,说明 Si 应变片的 piezoresistive 传感机制,解释 “中性轴位置” 对弯曲灵敏度和最小弯曲半径的影响。
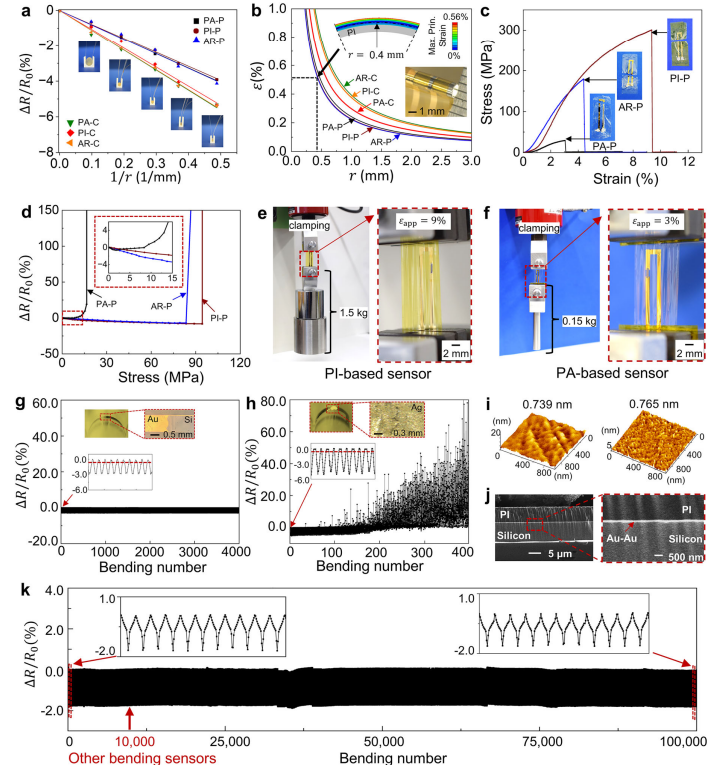
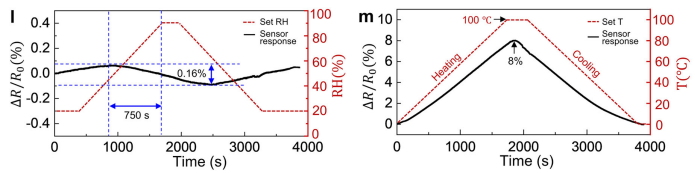

图 3:核心性能测试结果
核心:全面验证传感器性能 ——① 灵敏度:电阻变化与弯曲曲率线性相关(R²>0.997);② 弯曲极限:最小弯曲半径 0.4mm(Si 应变片应变≤0.56%);③ 机械强度:PI 基板传感器可承重 1.5kg,机械极限 300MPa;④ 循环稳定性:10 万次 5mm 半径弯曲后信号无衰减;⑤ 环境稳定性:温湿度变化下电阻波动小;
关键:通过 AFM 和 SEM 验证 WVPA 键合界面无空隙,表面粗糙度仅 0.7nm 级,解释高连接强度的根源。
图 4:机器人应用案例
核心:将传感器集成于耶鲁 Open Hand 机械手指关节,实时监测手指屈伸、握持状态;
关键:展示实际应用场景 ——① 120° 弯曲保持 20 分钟信号无漂移;② 120 + 次开合循环信号稳定;③ 成功抓取不同尺寸物体(杯子、马克笔),为机械臂精准控制提供反馈。
