 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。


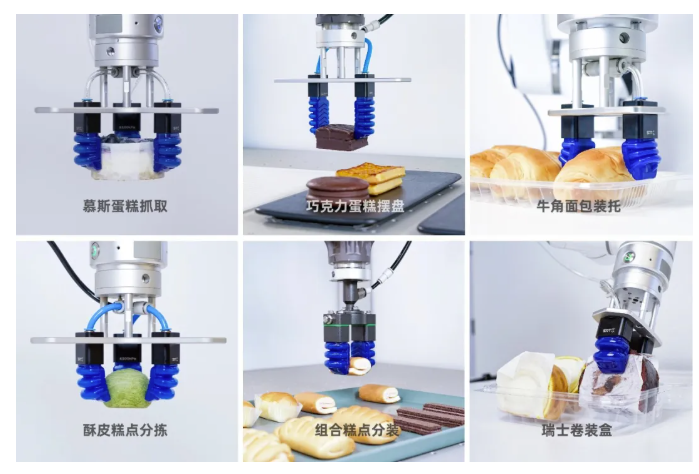
某烘焙企业专注蛋糕产品的规模化生产,其核心诉求是实现成品蛋糕从双层堆叠到分拣环节的自动化抓取。该类蛋糕具有柔软怕挤压、表面褐变皮层易刮花等物理特性,同时生产过程需满足食品级卫生、高速连续作业、低损耗的要求,这让传统自动化方案陷入两难 —— 人工抓取效率低且存在卫生风险,常规刚性夹爪与真空吸盘方案则频繁导致产品破损、表面污染,成为制约产能升级的关键瓶颈。基于仿生学原理和软体机器人技术的SRT柔性末端执行器,通过针对性的技术适配,为该客户实现了 “无损、高效、合规” 的自动化升级。

传统方案的三重核心矛盾痛点深析
蛋糕的抓取难题并非个例,而是烘焙行业易损糕点自动化的共性痛点,从以往客户的需求来看,传统方案的缺陷主要集中体现在三个方面:
1
破损率与产品价值的矛盾:刚性夹爪依赖机械力夹持,即便反复调整压力参数,仍难以避免蛋糕边缘挤压变形;真空吸盘则因负压吸附,易导致蛋糕表面破损,直接影响产品品相,增加次品率。
2
兼容性与生产效率的矛盾:不同批次的蛋糕可能存在尺寸波动,传统夹具需频繁更换或调试参数,导致生产线频繁停机,影响整体生产节拍;人工抓取虽能在一定程度上降低破损,但仍然易导致指痕、变形甚至破损,不良率长期维持在3%-5%之间,且人工操作易受疲劳影响,导致抓取一致性下降。
3
卫生与标准化困境:人员接触产品带来潜在的食品安全风险,且人工操作受熟练度影响,难以实现全流程标准化,品质稳定性无法保障。
软体机器人技术的核心方案:针对性破局
针对上述痛点,SRT柔性末端执行器通过材料创新与结构设计,实现从 “刚性抓取” 到 “柔性适配” 的转型,其核心技术逻辑与客户价值高度匹配:

夹爪本体采用FDA认证食品级硅胶材质,具备适宜的柔软度,可模拟人类手指的包覆式抓取,分散与蛋糕的接触面积,避免局部压力集中导致的蛋糕变形;
内置精确力控系统,支持0.1N级别的力度调节,即便面对堆叠两层的蛋糕垛,系统仍可通过控制夹爪行程与夹持力,提供足够摩擦力与抱紧力,确保搬运过程稳定不散塌。

仿生多指结构能自适应蛋糕的曲面轮廓与尺寸波动,无需更换机械结构,仅通过简单程序调整即可适应方形、圆形等不同形状与尺寸的糕点,具备高度兼容性与产线扩展性,实现 “一爪多用” 的柔性生产;
夹爪表面经过疏水抗粘处理,可有效避残留物附着,清洁过程简单便捷,仅需常规清水冲洗即可,降低交叉污染风险。
能与客户现有机械臂系统快速适配,缩短集成周期,保障生产线快速恢复高效运转,满足客户连续生产需求;

从数据看价值落地成果
项目实施后,该企业生产线在多个维度实现显著提升:
产品不良率大幅下降:从人工操作时的约3%-5%,降低至0.5%以下,显著提升产品合格率与外观一致性。
生产效率持续稳定:生产节拍从人工约40-50个/分钟,提升至稳定大于55个/分钟,效率提升超60%,有效突破产能瓶颈。
实现无人化操作:每班节省1-2名人工,在降低人力成本的同时,彻底解决“招工难、培训慢”的痛点。
构建标准化生产体系:全流程自动化操作,杜绝人为干预,保障品质统一,并符合食品安全体系的非接触生产要求。

在食品工业自动化进程中,“抓取”这一基础动作的实现方式,直接影响着整个生产线的效率、成本与品质。本案例中,软体机器人技术成功解决蛋糕自动化抓取难题,其核心优势 ——以仿生学为底层逻辑,通过柔性接触、自适应兼容、精准力控,解决易损、异形、高卫生要求产品的自动化抓取痛点,具备极强的普适性,可广泛应用于各类易损、异形、软质食品的抓取与搬运场景,如面包、饼干、巧克力、水果等。
该解决方案体现了“从场景出发,以技术赋能”的产品逻辑,通过可复制、可调整的技术模块,为客户提供可持续、可拓展的自动化价值。
