 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



当前,机器人执行器正朝着“轻量化、模块化”飞速演进,但传统分散式驱动与控制方案面临的体积、功耗与响应速度瓶颈也日益凸显。
革命性芯片发布:终结执行器设计的复杂拼凑时代
直面这一核心挑战,中科无线半导体正式发布其机器人动力系统芯片家族的关键新成员——专精于“机器人运动控制”的AI ASIC芯片CT-2001系列。
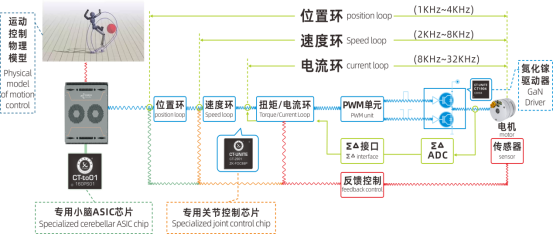
作为CT-1902/CT-1906氮化镓驱动器芯片的完美搭档,它并非简单的功能叠加,而是通过内置先进FOC算法与高集成度设计,将控制核心、功率驱动与通信接口深度融合,旨在终结执行器设计的复杂拼凑时代,为下一代机器人提供一颗高度集成的“运动智能心脏”。
突破瓶颈:模拟计算架构实现“条件反射”级控制
在高端机器人执行器迈向精密化、敏捷化的道路上,正面临一个核心瓶颈:传统数字计算架构固有的处理延时,导致系统在应对突发负载、实现高速高精度轨迹跟踪时存在响应迟滞,这限制了机器人在复杂动态环境中的“本能化”反应能力。
CT-2001系列的诞生,正是为了从根本上破解这一难题。其革命性在于芯片内部植入了独特的模拟计算单元(ACU)与模拟微积分处理单元(A-IPU),从而将FOC算法中最核心、最耗时的计算任务从传统的数字域处理,转向模拟域的实时、并行计算。这一架构级创新,使得关键控制指令的硬件处理延时实现了从2.8纳秒到0.2纳秒的数量级跨越。

这项突破的深层价值在于,它让机器人执行器首次获得了近乎“条件反射”级的控制能力。面对负载的突变或复杂的运动指令,系统无需再经历漫长的数字计算周期,即可近乎瞬时地完成力距调整与姿态校准。这不仅大幅提升了机器人在高速、高负载工况下的动态响应速度与控制精度,更为其稳定性与可靠性树立了新的标杆。
展望未来,这一低延时、高精度的控制能力,正是实现下一代“具身智能”机器人的关键基石。它将使机器人能够像生物体一样,对外界变化做出快速、精准的本体反应,为最终实现真正自适应、能应对未知复杂环境的智能机器人提供了至关重要的硬件支撑。
与此同时,该芯片的量产也标志着我国在高精度工业伺服驱动领域实现关键突破,打破长期以来对进口芯片的依赖,为本土机器人产业链的自主可控与持续创新提供了坚实的“芯”支撑。


