 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



引言
压力传感器在健康监测、智能机器人和人机交互等领域具有广泛应用,然而传统硅基压阻式压力传感器在灵敏度与线性范围之间存在难以调和的矛盾。
近日,一项发表于《Science Advances》的研究从蝎子的高精度机械感知机制中获得灵感,开发出一种仿生压阻式压力传感器(BPPS),在0至500 kPa的宽压力范围内实现了65.56 mV/V/kPa的高灵敏度和0.99934的极高线性度。该传感器不仅能区分层流、过渡流和湍流,还能通过结合小波变换与ResNet18深度学习网络,以超过85.42%的准确率识别不同形状的接近物体,为智能机器人的环境感知与主动避障提供了新方案。
图|论文首页图
研究特点
-破解灵敏度与线性度互斥难题-
本研究最大的创新在于从蝎子的两种机械感受器,缝感受器与触毛感受器中提取结构灵感,分别设计了应力陷阱与弯曲抑制单元,协同提升了传感器的灵敏度与线性度。
蝎子的缝感受器能将机械能汇聚于缝尖,形成“应力陷阱”,增强信号感知;而触毛感受器根部的爪状结构则能抑制膜的非线性变形,减少能量耗散。BPPS通过在SOI芯片的正面布置应力陷阱,背面制作弯曲抑制单元,结合惠斯通电桥结构,实现了灵敏度与线性度的同步优化。
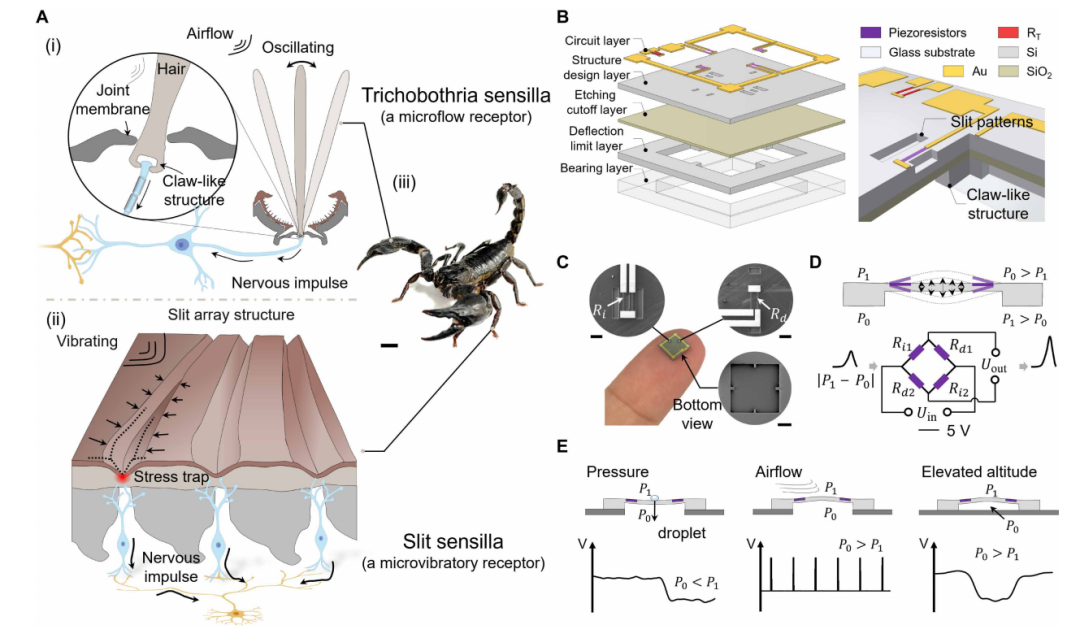
图 | 受蝎子机械感受器启发的高精度压力传感器
研究方法
-从生物机理到MEMS器件的闭环研究-
研究团队首先通过显微CT、扫描电镜和电生理实验系统分析了蝎子感受器的结构与响应特性。随后,利用COMSOL进行有限元模拟,对比了五种不同膜结构设计的性能。结果表明,仿生设计在应力集中与变形控制方面表现最优。在制造方面,BPPS采用MEMS工艺制备,包括离子注入、金属溅射、硅-玻璃阳极键合等步骤,确保了器件的一致性与可重复性。
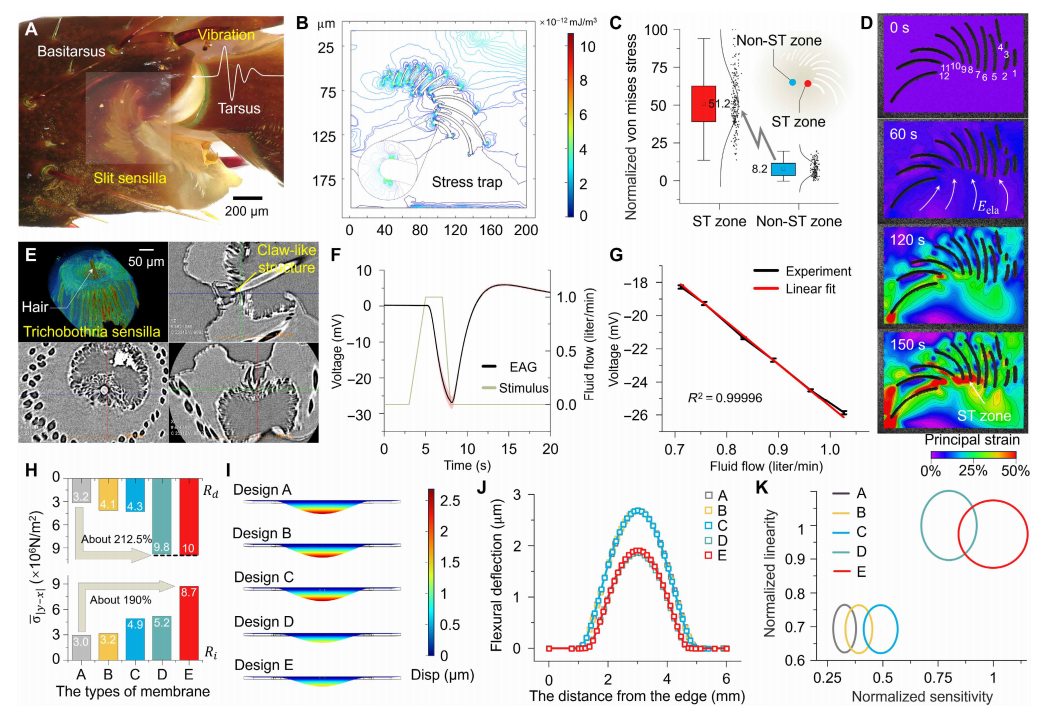
图 | 蝎子机械感知机制的揭示与仿真优化
研究过程
-从蝎子感知到机器人应用完整验证性能-
实验结果显示,BPPS在静态压力测试中表现出高线性响应,响应时间为10 ms,恢复时间为4 ms,耐久性超过20,000次循环。在气流感知方面,BPPS能清晰区分不同流态,并通过小波变换提取频率特征。结合ResNet18网络,系统能识别五种不同形状物体的接近行为,准确率达85.42%。
此外,研究团队还将四个BPPS集成于六足机器人平台,模拟蝎子的捕食与避敌行为。机器人能根据传感器输出值判断物体大小与方向,实现自主趋近或逃离,展示了其在近体流场感知中的潜力。
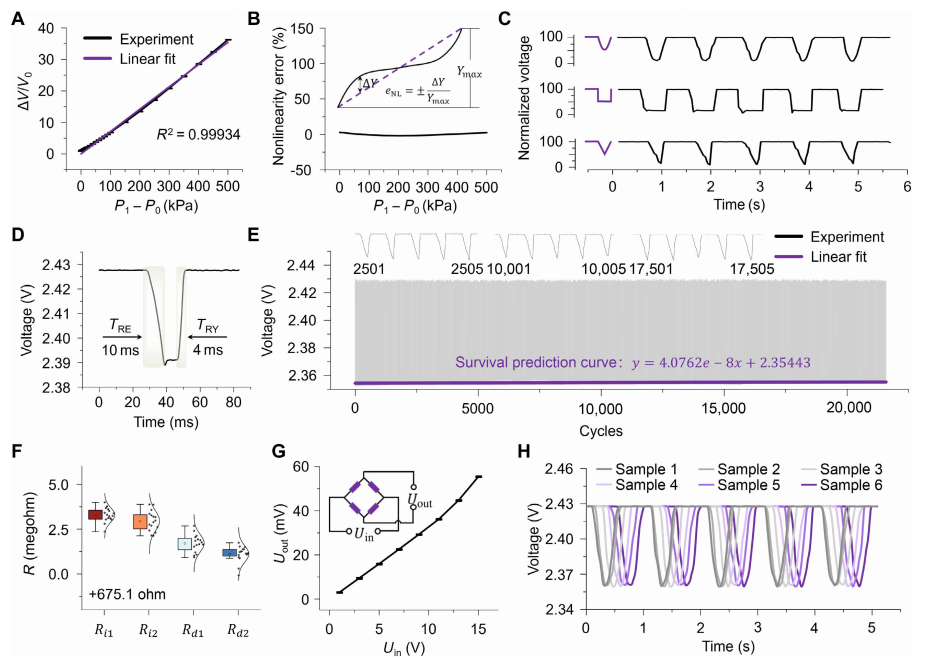
图 | BPPS的表征
未来展望
-开辟仿生传感与智能感知新路径-
BPPS的成功研制为高精度压力传感器设计提供了新思路,其结构策略可推广至其他类型传感器,如压容式传感器。未来,若能将BPPS柔性化并集成于人体机器人曲面表面,将进一步提升其在可穿戴设备与人机交互中的应用前景。然而,仍需解决曲面适配、信号串扰与解耦等工程挑战,以实现标准化与模块化传感单元的开发。
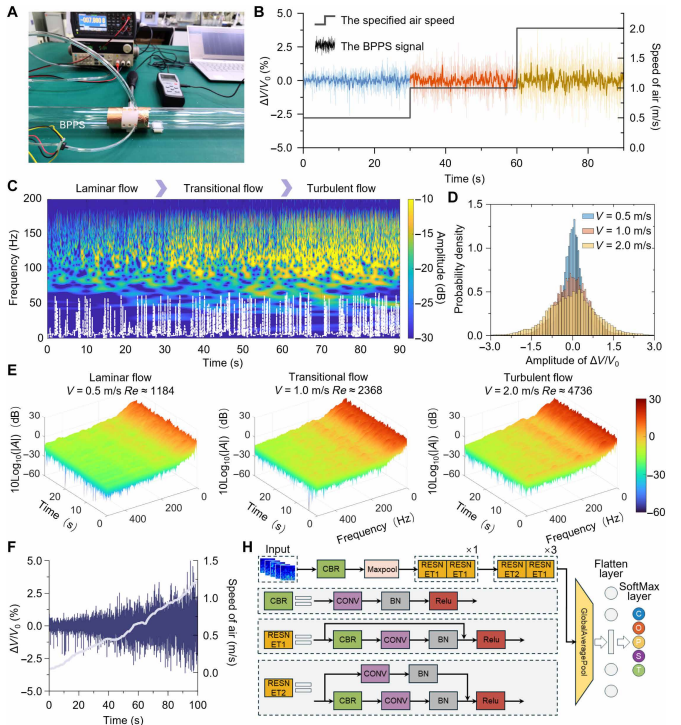
图 | 流态检测与识别性能
小编锐评
本研究不仅突破了传统压力传感器在灵敏度与线性范围之间的权衡瓶颈,更通过多学科交叉展示了仿生设计的强大生命力。BPPS的高性能与多功能性为其在智能机器人、航空航天、医疗健康等领域的应用奠定了坚实基础,堪称“结构创新驱动性能突破”的典范。未来,随着算法的进一步优化与集成技术的成熟,这类传感器有望成为智能体感知系统的“标配”。


