 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



当人形机器人成为2024年科技圈最火的赛道,当具身智能正从概念走向落地,六维力传感器作为产业链深水处的关键部件,市场快速爆发,根据数据统计,2024年中国六维力传感器整体市场出货量已突破1.4万台,预计自2027年起,中国六维力传感器市场将迎来实质性放量阶段,到2030年中国六维力传感器在人形机器人领域的出货量将有望达到23万台,2024年~2030年的复合增长率将超过20%,展示出强劲的市场潜力与发展空间。
2023-2030年中国人形机器人领域六维力传感器市场规模推移(台)
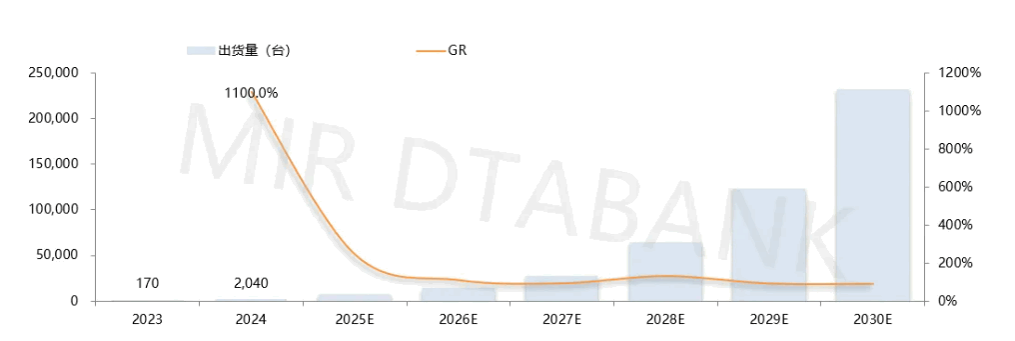
数据来源:《2025年中国人形机器人六维力传感器市场研究报告》
虽然2024年以来人形机器人需求带动六维力传感器市场发展速度较快,但由于仍处于逐步批量量产阶段,在这个新领域中,各家企业、机构的统计方式和维度都暂未形成共识,技术路径尚未收敛、拉齐,这使得不同厂商在产品规格定义、精度标定方法、应用场景划分等方面各有标准,导致公布的性能参数,市场容量测算和市占率结果往往口径不一。同时,在力觉感知、解耦算法、温度补偿等关键技术环节,多种解决方案并行发展,尚未出现行业公认的最优路径。这种技术和标准层面的分散性,一方面为创新留出了探索空间,但另一方面也增加了下游应用集成的复杂度,在一定程度上延缓了产品标准化和成本优化的进程,需要产业链上下游进一步协同推动共识的形成。
基于这类问题,MIR关注到,国家标准《机器人多维力/力矩传感器检测技术规范》(GB/T43199-2023)于2024年4月1日正式实施,为机器人六维力传感器的性能指标、测试方法、校准流程划定了及格线,尝试让行业走向规范化征程。其中值得一提的是,我国六维力传感器的标杆性企业坤维(北京)科技有限公司作为主笔单位,参与制定了该标准。
MIR DATABANK
01
具身智能的隐形门槛
人形机器人与具身智能对六维力传感器的核心要求到底是什么?虽然人形机器人与具身智能的应用场景还未明确,对六维力的性能指标参数要求还不清晰,很多人的认知停留在六维力传感器只要能测出Fx、Fy、Fz三个力和Mx、My、Mz三个力矩就够了这一阶段。但真正懂行的人知道,具身智能对传感器的要求,远比简单能测力要苛刻得多,其对六维力传感器提出的“隐形门槛”远高于传统工业应用,这些门槛并非简单的性能参数,而是关乎其能否在真实、动态、非结构化的环境中实现智能交互的本质要求。
想象一下:当人形机器人进入工厂装配3C产品,要把细小的零件插进卡槽,它需要精准感知手部的握力,需要实时、精准反馈0.1N的力变化,多一分力就可能压坏零件,少一分力就装不进去;当它在户外行走,遇到凹凸不平的路面,脚踝传感器需要瞬间捕捉冲击力,避免崴脚或断脚。这些场景背后,就藏着具身智能对六维力传感器的核心诉求:低串扰、高过载、长期可靠性。
而且实际场景需求意味着人形机器人与具身智能所需要的六维力传感器,一定不是实验室里测一次准就行的样品,而是要在日复一日的实际动态运行中,抵抗温度变化、湿度波动、振动冲击,还要保证零点不漂移、精准度不衰减,真正做到稳定、持久的神经感知能力。
近年来,由于人形机器人行业仍处于早期市场,其作为需求方还未能提出对六维力传感器精细化力控的场景需求和更加具体的性能参数要求,而已经投入使用的数采场景对六维力传感器的准度要求其实并不高。从市面上六维力传感器供货情况来看,也存在着质量和性能良莠不齐,标注的参数无法验证或检测其真实性的情况。坤维正是看到这些,决定从技术源头去推动六维力传感器检测标准的制定。
在国家标准的制定过程中,坤维始终保持着一份清醒与坚持:从航天级技术传承到主导国家标准制定,需要用实打实的技术积累、卓绝的产品品质,满足愈发严苛的动态响应与实时性极致要求,持续提升准度(含串扰)、稳定性、鲁棒性与可靠性,从而真正支撑人形机器人走得更稳、抓得更准、用得更久,为中国具身智能产业筑牢六维力传感器的可靠性根基。
不同于部分企业用传统金属应变计手工制作,用一维力标定设备简化标定和检测六维力,坤维选择了一条难而正确长远的路,尝试用航天级技术打底,把更高准度和长期可靠性真正刻进六维力传感器产品的基因里。
坤维从成立之初,就避开了这条短期捷径。坤维深知,具身智能的未来,需要的是技术驱动的匠心。不需要纸上谈兵的产品,需要的是可靠实用的伙伴。尤其随着未来人形机器人量产并实现规模化落地,对于作业可靠性、交互精度等要求将持续提升,“凑合用”的六维力传感器必然很难撑起大多企业场景的实际落地需求。为此,坤维积极推动国家标准的制定,从而填补了我国机器人力觉传感器检测评价体系空白。
02
六维力国家标准制定者强在哪?
坤维能参与国家标准的制定并非巧合,提到六维力传感器的技术源头,很多人会想到工业场景,但少有人知道,这项技术最早的突破,其实来自对极端可靠性要求极为苛刻的航天领域。而坤维的底层技术,正源自航天级力测量技术的50年积累。20年前,坤维的技术团队就开始为航天工程研发力测量设备,从飞行器的空气动力学特性测试,到火箭发射时的实时力监测,每一次测量都要求零误差,因为在航天领域,一丝一毫的精度偏差,都可能导致灾难性后果。这份极端严谨的技术基因,被坤维完整地传承到了人形机器人六维力传感器的研发中。最直观的体现,就是坤维成了国内唯一具备大批量六维联合加载标定与检测能力的企业。
检测有这么重要吗?答案是肯定的,因为这是传感器技术发展的必然。举个简单的例子:人形机器人在抓握物体时,手部会同时受到向下的重力、向前的推力和旋转的力矩,这是一个六维力耦合的复杂场景。但如果用一维设备分别标定,就像在铁人三项比赛中,分别分开测一个人的跑步速度、游泳速度、骑车速度,然后认为这就是他比赛的速度,这就是完全脱离实际工况的结果,测出来的精准度再高,也缺乏实际意义。而六维力传感器的核心技术和价值,很大程度上就体现在高精准度的、专用的整体标定系统和解耦算法上。
而坤维的六维联合加载标定检测设备,能模拟人形机器人实际运动中的复杂受力情况,同时对三个力和三个力矩进行精准标定和检测,同时识别并补偿掉耦合效应,最终实现高精准度的六维力/力矩测量。更值得一提的是,早在2021年,坤维就开始自研这套设备,如今已建成3万台/年的全自动标定和检测产能,这意味着,每一台从坤维出厂的六维力传感器,都经过了实战级的考验,而不是实验室级的美化。
业界不少专业客户都提到,坤维的传感器在温度漂移和零点漂移方面远低于行业平均水平。例如在-10℃到40℃的温度范围内,很多企业的零点漂移仅能达到0.1%FS/℃,而坤维的六维力产品则能控制在0.01%FS/℃以内。这意味着,采用坤维六维传感器的人形机器人即使在复杂环境中,力感知精准度也不会受串扰影响。
更关键的是,坤维还把这份技术标准推向了全行业。在此之前,行业里没有统一的检测标准,有的厂商标重复精度0.1%,有的标线性精度0.1%,但都避开了最关键的串扰能力,而串扰恰恰是影响人形机器人稳定精细操作的核心指标。如今,国家标准明确了六维力传感器的准度等级,即优质的六维力传感器的准度(含串扰)需≤0.5%FS,而坤维的产品,已经实际能做到优于0.3%FS(国军标),远超大部分市场竞品2%FS~5%FS的实际串扰指标,这意味着其技术和产品可以帮助机器人落地更多需要精细操作的应用场景。
03
人形机器人未来到底要什么样的传感器
可以发现,随着人形机器人的应用场景不断变化,从早期的数采,到未来的装配、服务、医疗,对传感器的需求正在不断升级。这不仅仅需要对产品有更深层次的理解,更需要具备对下游场景的理解,才有望从响应需求走到引领需求。
如果说低串扰技术是坤维的内功,那么精准适配人形机器人需求就是坤维实现内外兼修的关键。MIR了解到,坤维早在人形机器人样机阶段时,就开始和银河通用、智元机器人、小米等头部厂商达成合作,深度参与到他们的传感器方案设计,这使得坤维并不局限于一家卖产品的公司,而是试图和客户一起定义人形机器人产品。因为人形机器人的身体结构和人类相似,关节、手腕、脚踝等部位的空间极其有限,但又需要具备高刚性、高过载能力,这对六维力传感器而言,尺寸小,量程大,高刚性、高过载、轻量化、高动态、抗干扰、安全稳定都是核心刚需。
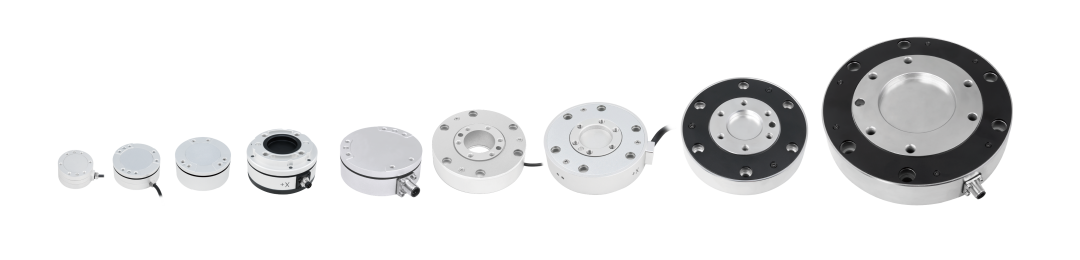
图片来源:坤维科技
同时,在这条道路,坤维还通过对结构设计、工艺的持续打磨,交出了一份性能与性价比两者兼顾的答卷,推出了HRS人形系列,HPS高性能系列,KWR精准系列,CSR标准系列四款满足市场需求的六维力传感器。
1 HRS人形系列产品

2 HPS高性能系列产品
3 KWR精准系列产品

4 CSR标准系列产品

例如坤维推出的HRS人形系列产品,其中HRS30-60系列满足了人形机器人手腕处对于传感器小型化的需求。而HRS60-96系列,则满足了人形机器人脚踝,足底等部位小空间集成的需求,需要传感器做到厚度薄,高刚性和高过载能力,有效避免机器人在跑步、跳跃等场景中“崴脚”、“断脚”风险。其中最令人惊艳的是坤维最新推出的脚踝六维力传感器HRS65-ET,具备高刚性、高过载能力的同时其厚度仅有10mm。此外,HRS系列的绝大部分六维力传感器内置智能数采电路,技术指标可根据应用场景和成本需求高效定制,且具备快速交付能力。
除了结构设计,工艺的突破更是坤维的秘密武器。应变计作为传感器的敏感元器件可以说对传感器的力值传导和检测至关重要。在传感器制造方面,一直以来行业内都是使用传统的金属应变计+手工粘贴的工艺制作。单片应变计大小只能做到4-5MM,而一个六维力传感器需要容纳几十片应变计,这就导致传统工艺没办法将传感器做小型化。随着人形机器人的市场爆发,对于六维力传感器小型化需求越来越高,坤维早早意识到这个趋势,早在2020年就开始布局研发MEMS工艺,为六维力传感器带来了小型化、低成本、大批量生产的曙光。MEMS工艺的硅基应变计单片可以做到0.2-0.5MM的大小,基于此项变革,使得六维力传感器的小型化诉求得以实现。更进一步的优势是,MEMS工艺应变计的灵敏度比金属应变计灵敏度高20倍以上,因此可以同时提高传感器的过载能力和信噪比。基于MEMS工艺的应变计做成的六维力传感器无疑更加符合人形机器人发展的刚性需求。
更值得一提的是,MEMS工艺的独特结构还能实现高一致性大批量生产,极大地提升了产能和良率,这为未来人形机器人规模化量产奠定了基础。因为随着行业不断发展,各类场景对于高性价比人形机器人产品的需求逐步提升,高性价比才能撑得起具身智能的未来,而如果每个传感器的价格高达数万元甚至数十万元,那么仅传感器一项就会将整台机器人的BOM成本推高到令人望而却步的水平,彻底扼杀其商业化的可能性。只有实现“高性价比”,才能让机器人公司负担得起在单台机器上规模化部署多个传感器的成本,这是实现真正智能交互的物理基础。
在坤维看来,人形机器人六维力传感器的竞争,不是短期市场一城一地得失的竞争,而是谁能更好、更长期地支撑具身智能落地的竞争。没有核心技术的产品,就像沙滩上的城堡,一旦行业进入精细化发展阶段,就会被轻易替代。为了进一步突破材料的极限,真正做好六维力传感器,坤维还在2024年专门建成了材料科学实验室,组建了由材料学博士领衔的研发团队,试图从更上游出发,持续研究如何让传感器的材料更轻、更坚固、更耐老化,未来这种材料有望率先应用于人形机器人传感器上,让机器人更轻便,行走更节能。
结语 具身智能是一场长跑
2025年是人形机器人的量产元年,2027年将是人形机器人的规模化元年。可以想象,在这场从概念到落地的长跑中,六维力传感器作为人形机器人的力觉神经,必然扮演着至关重要的角色。
未来,当人形机器人走进工厂、走进家庭、走进各行各业,当具身智能真正改变人们的生活时,我们或许会发现:随着中国各行业产业走向高质量发展,像坤维这样坚持技术创新的企业,正通过从航天级技术传承到国标制定,从金属应变计突破到MEMS工艺应变计革新,从实验室的深耕到客户的深度合作,快速成长为行业的隐形冠军。
因为在具身智能的长跑中,坤维作为头部六维力传感器企业走的每一步,都是在为中国具身智能产业筑牢技术上的“新长城”。


