 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



四川大学Xiaodong Wu团队,在《Science Bulletin》上发布了一篇题为“Intrinsically soft and fully recyclable robotic sensors with quadruple sensing functions for reliable human-robot interactions”的论文。
论文内容如下:
一、摘要
人机交互(HRI)正变得日益普及,双方在执行任务时共同参与,而可靠的机器人传感器则是实现高效且安全的人机交互的前提条件,尤为关键的是在非结构化或动态环境中。尽管已开发出多种类型的机器人传感器,但大多局限于单一或双重功能,难以感知复杂环境。在此,作者提出一种具有四重感知功能的本征柔性机器人传感器,该传感器集成了空间接近感应、热接近感应、热触觉感应以及机械力感应等多项功能。通过这四重感知能力,既能以接触方式,也能以非接触方式精准区分热刺激和机械刺激。更为重要的是,所有传感器组件在使用寿命结束后均可实现完全回收再利用,从而实现卓越的成本效益与生态可持续性。作者构建了一个闭环智能人机交互系统,将本征柔性传感器与气动软抓手及可编程机械臂相结合,成功实现了多种可靠的人机交互场景(如人机接口、物体感知与分类、床边临床护理等),充分展示了四重感知功能的应用潜力。本研究为丰富机器人感知能力、提升在复杂环境中人机交互的可靠性提供了一条新的路径。
二、背景介绍
随着智能机器人和人工智能的快速发展,人机交互(HRI)在先进制造、医疗诊断与治疗、智能家居、娱乐、物流和服务行业等领域变得无处不在,甚至不可避免。在动态和不确定的环境中,安全高效的人机交互对于自适应移动性、物理操作或社交互动至关重要,而机器人传感器是实现可靠人机交互的关键。柔性机器人传感器可用于检测多种参数,包括压力、温度、接近度和其他环境因素。例如,柔性压力传感器可用于解析机械刺激的大小和分布,从而帮助机器人安全精细地操作物体。柔性温度传感器可使机器人能够感知环境或物体的温度。柔性接近度传感器可检测外部物体的接近,避免机器人与人体或障碍物发生危险碰撞。然而,目前开发的大多数柔性机器人传感器功能单一,无法解析复杂的环境信息。
最近,具有不同传感功能的多功能机器人传感器已被开发出来,并在人机交互(HRI)应用方面展现出巨大潜力。例如,通过将压阻传感元件与摩擦电或压电传感元件相结合,实现了能够检测静态和动态机械刺激的柔性机器人传感器。此外,基于不同传感机制(如压阻和热电)制造出了能够解析机械刺激和热刺激的柔性机器人传感器。还基于电容传感机制实现了用于检测外部物体接近度及随后施加的压力的双模态机器人传感器。这些开创性工作拓展和丰富了传统机器人传感器的功能,使机器人能够以更精确、快速和安全的方式与周围环境进行交互。然而,尽管最近取得了显著进展,但大多数报道的多功能机器人传感器仅限于双功能集成。将更复杂的功能单片且无缝地集成到一个设备中以实现可靠的 HRI 仍然具有挑战性。
在本研究中,作者受自然皮肤感知能力的启发,提出了一种新型的内在柔性机器人传感器,其四重感知功能集成于单一设备中,包括空间接近感知、热接近感知、热触觉感知和机械力感知。凭借这种多功能性,机械和热刺激均可通过接触和非接触模式得到良好解析。所制造的传感器具有良好的柔韧性和内在柔软性,使其能够符合复杂的三维曲面。更重要的是,所有机器人传感器的材料均可完全回收再利用,以构建新一批传感器,显著缓解了资源消耗问题及电子废物带来的环境危害。作为概念验证示范,通过将机器人传感器集成到柔性抓手和机器人手臂上,构建了一个闭环且可靠的人机交互系统。通过利用四重感知功能,成功展示了多种可靠的人机交互场景(例如,人机交互、物体感知与分类、床边临床护理等)。本研究为全面的机器人感知提供了一个可行且多样化的平台。
三、内容详解
3.1 设计理念与原则
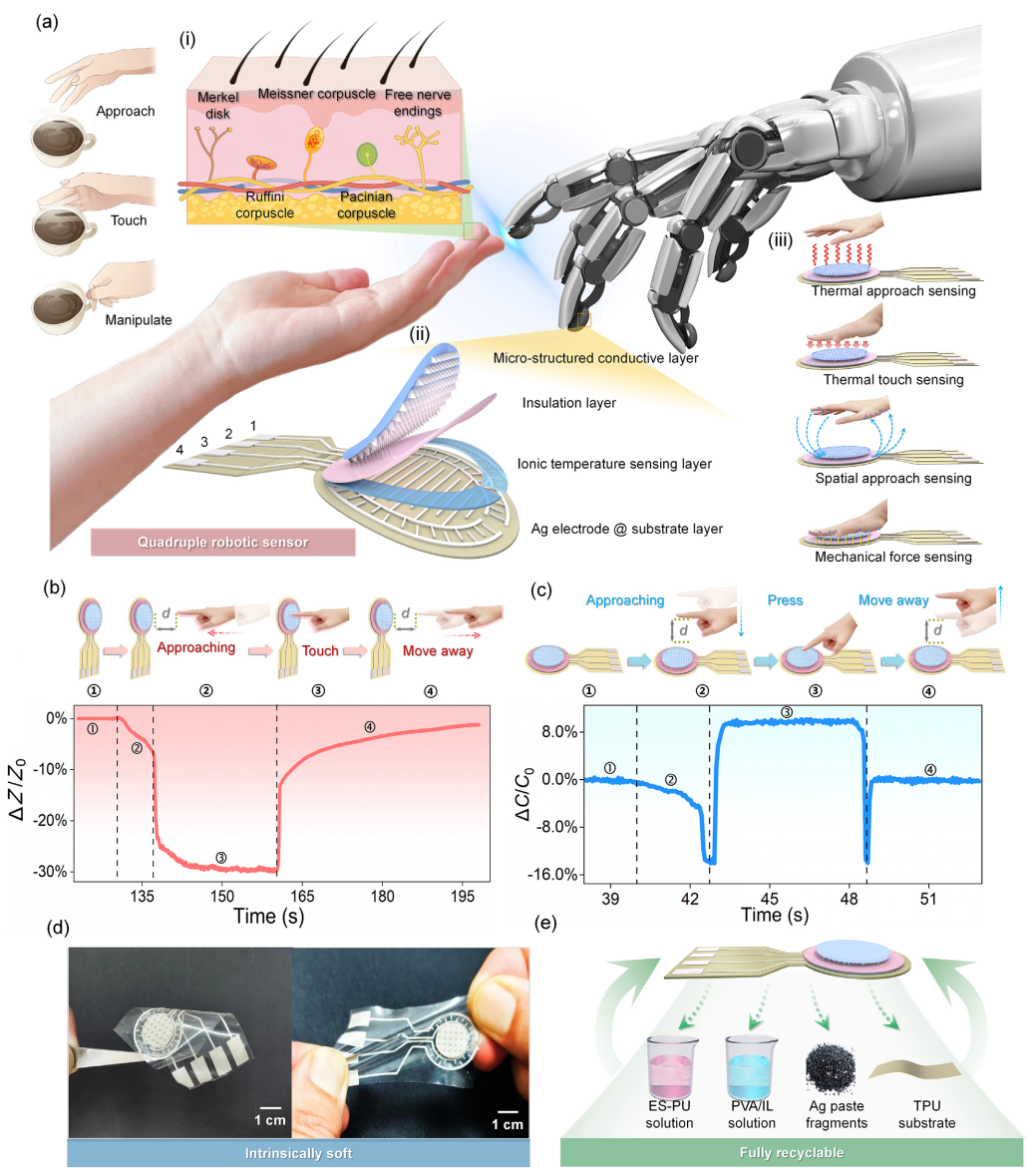 图1. 机器人传感器的设计理念及典型响应特性。(a) 具备四重感知功能的机器人传感器的设计理念与结构布局,用于实现可靠的人机交互。(i) 示意图展示具有多样感受受体的天然皮肤的感知能力,用于物体感知与操作。 (ii) 机器人传感器的组成与结构布局。 (iii) 机器人传感器的四重感知功能,包括热接近感知、热触感知、空间接近感知和机械力感知。(b) 示意图展示连续的热接近与热触感知过程及其典型响应行为。 (c) 示意图展示连续的空间接近与机械力感知过程及其典型响应行为。 (d) 数字图片展示所制备的机器人传感器的柔韧性与柔软性。 (e) 示意图说明机器人传感器的可回收性。
图1. 机器人传感器的设计理念及典型响应特性。(a) 具备四重感知功能的机器人传感器的设计理念与结构布局,用于实现可靠的人机交互。(i) 示意图展示具有多样感受受体的天然皮肤的感知能力,用于物体感知与操作。 (ii) 机器人传感器的组成与结构布局。 (iii) 机器人传感器的四重感知功能,包括热接近感知、热触感知、空间接近感知和机械力感知。(b) 示意图展示连续的热接近与热触感知过程及其典型响应行为。 (c) 示意图展示连续的空间接近与机械力感知过程及其典型响应行为。 (d) 数字图片展示所制备的机器人传感器的柔韧性与柔软性。 (e) 示意图说明机器人传感器的可回收性。
3.2 制造与表征
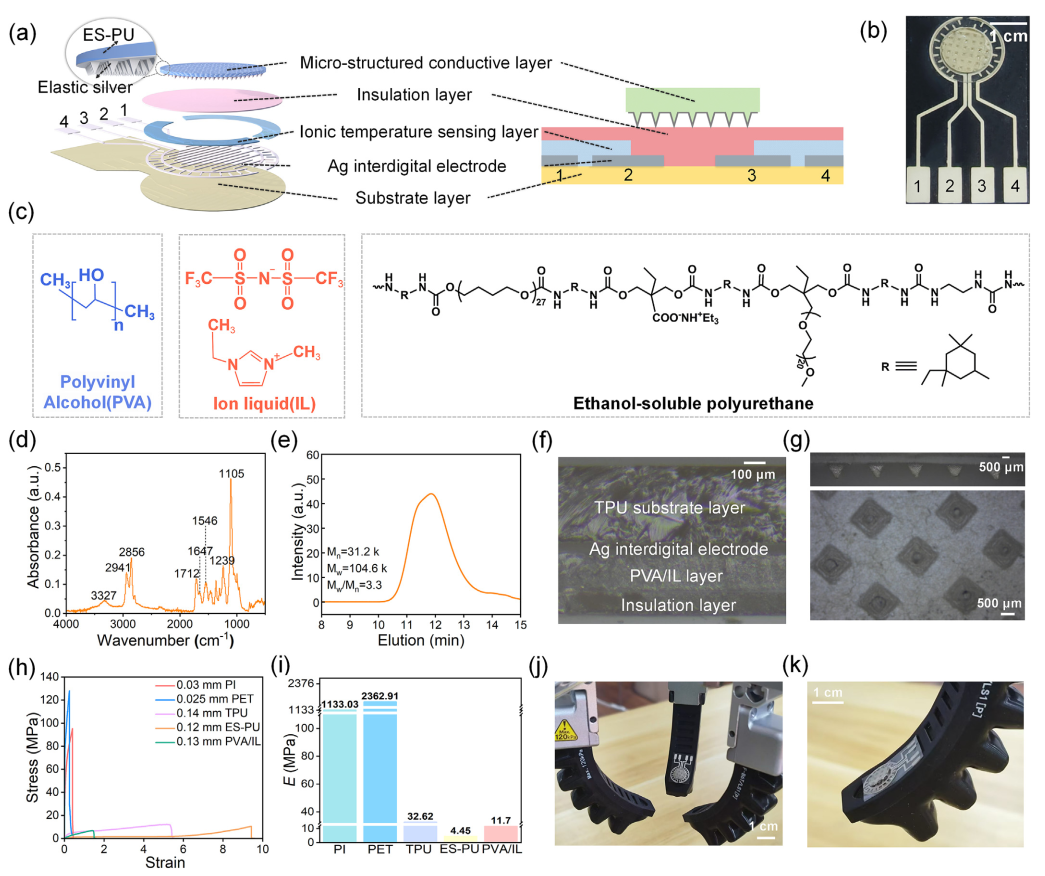 图2. 软体机器人传感器的制备与表征。(a) 示意图,展示软体机器人传感器的三维结构布局及其二维截面视图。(b) 软体机器人传感器的实物照片。(c) 软体机器人传感器中关键组分(即聚乙烯醇PVA、离子液体IL和热塑性聚氨酯ES-PU)的分子组成与结构。(d, e) 自合成的ES-PU材料的傅里叶变换红外光谱(FTIR)及凝胶渗透色谱(GPC)谱图。(f) 光学显微镜图像,显示软体机器人传感器的横截面形貌。(g) 光学显微镜图像,展示微结构导电层顶部工程化金字塔图案。(h, i) TPU层、ES-PU层及PVA/IL层的应力-应变曲线与杨氏模量,采用常规的PET和PI薄膜作为对比。(j, k) 数字照片,展示与三维弯曲及动态变化的软抓手相贴合的软体机器人传感器。
图2. 软体机器人传感器的制备与表征。(a) 示意图,展示软体机器人传感器的三维结构布局及其二维截面视图。(b) 软体机器人传感器的实物照片。(c) 软体机器人传感器中关键组分(即聚乙烯醇PVA、离子液体IL和热塑性聚氨酯ES-PU)的分子组成与结构。(d, e) 自合成的ES-PU材料的傅里叶变换红外光谱(FTIR)及凝胶渗透色谱(GPC)谱图。(f) 光学显微镜图像,显示软体机器人传感器的横截面形貌。(g) 光学显微镜图像,展示微结构导电层顶部工程化金字塔图案。(h, i) TPU层、ES-PU层及PVA/IL层的应力-应变曲线与杨氏模量,采用常规的PET和PI薄膜作为对比。(j, k) 数字照片,展示与三维弯曲及动态变化的软抓手相贴合的软体机器人传感器。
3.3 传感机制与性能
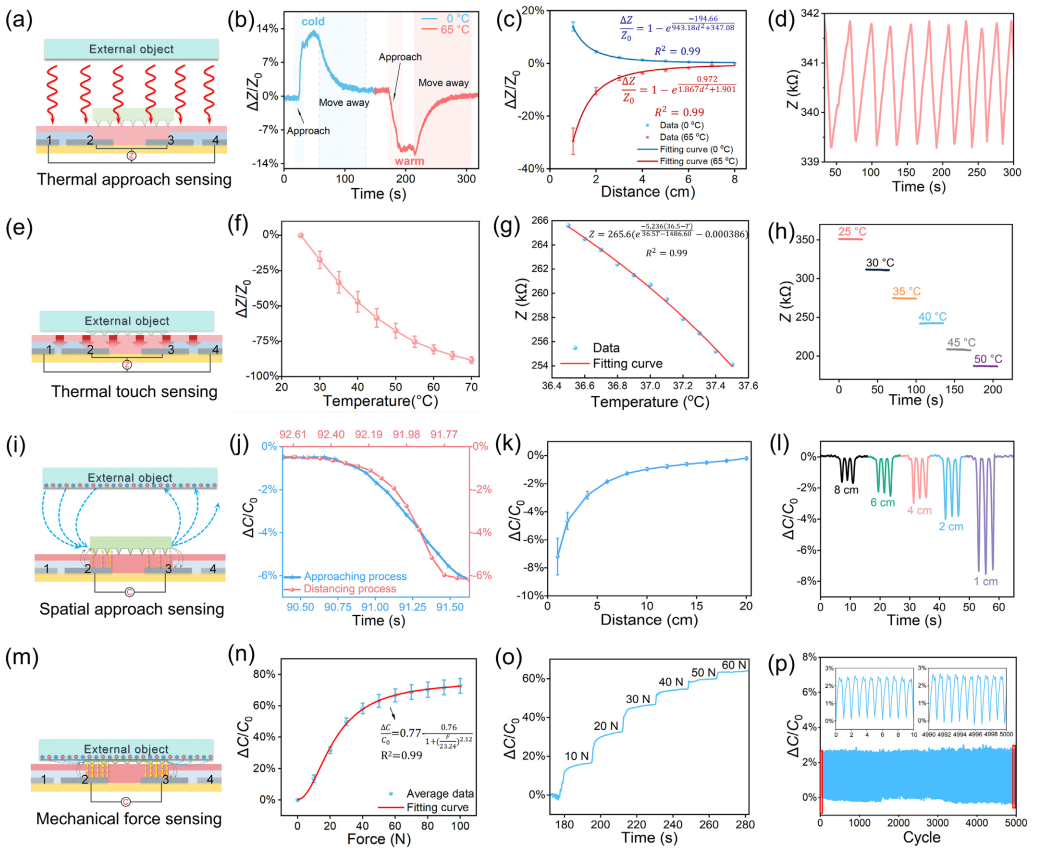 图3. 机器人传感器的感知机制及性能特征。(a) 示意图展示了基于热辐射效应的热感知机制。 (b, c) 传感器对接近冷物体(0 °C)和热物体(65 °C)的响应行为及标定曲线。 (d) 传感器对从远处逐渐接近并移开温暖手掌(距离传感器1厘米)的响应行为。 (e) 示意图展示了基于热传导效应的热触觉感知机制。 (f) 传感器与不同温度物体接触时的标定曲线。 (g) 传感器在热触觉感知中的最低温度检测分辨率。 (h) 传感器对不同稳定环境温度的响应信号。 (i) 示意图展示了基于电场耦合效应的空间接近感知机制。 (j) 传感器在手逐渐接近后又移开的响应行为。 (k) 传感器的空间接近感知标定曲线。 (l) 传感器在不同距离下手部反复接近时的信号变化。 (m) 示意图展示了基于电容参数调制的机械力感知机制。 (n) 传感器的机械力感知标定曲线。 (o) 传感器对不同大小稳定机械力的响应行为。 (p) 传感器在5000次加载-卸载测试中的重复性和可靠性。
图3. 机器人传感器的感知机制及性能特征。(a) 示意图展示了基于热辐射效应的热感知机制。 (b, c) 传感器对接近冷物体(0 °C)和热物体(65 °C)的响应行为及标定曲线。 (d) 传感器对从远处逐渐接近并移开温暖手掌(距离传感器1厘米)的响应行为。 (e) 示意图展示了基于热传导效应的热触觉感知机制。 (f) 传感器与不同温度物体接触时的标定曲线。 (g) 传感器在热触觉感知中的最低温度检测分辨率。 (h) 传感器对不同稳定环境温度的响应信号。 (i) 示意图展示了基于电场耦合效应的空间接近感知机制。 (j) 传感器在手逐渐接近后又移开的响应行为。 (k) 传感器的空间接近感知标定曲线。 (l) 传感器在不同距离下手部反复接近时的信号变化。 (m) 示意图展示了基于电容参数调制的机械力感知机制。 (n) 传感器的机械力感知标定曲线。 (o) 传感器对不同大小稳定机械力的响应行为。 (p) 传感器在5000次加载-卸载测试中的重复性和可靠性。
3.4 机器人传感器在人与机器人交互中的应用
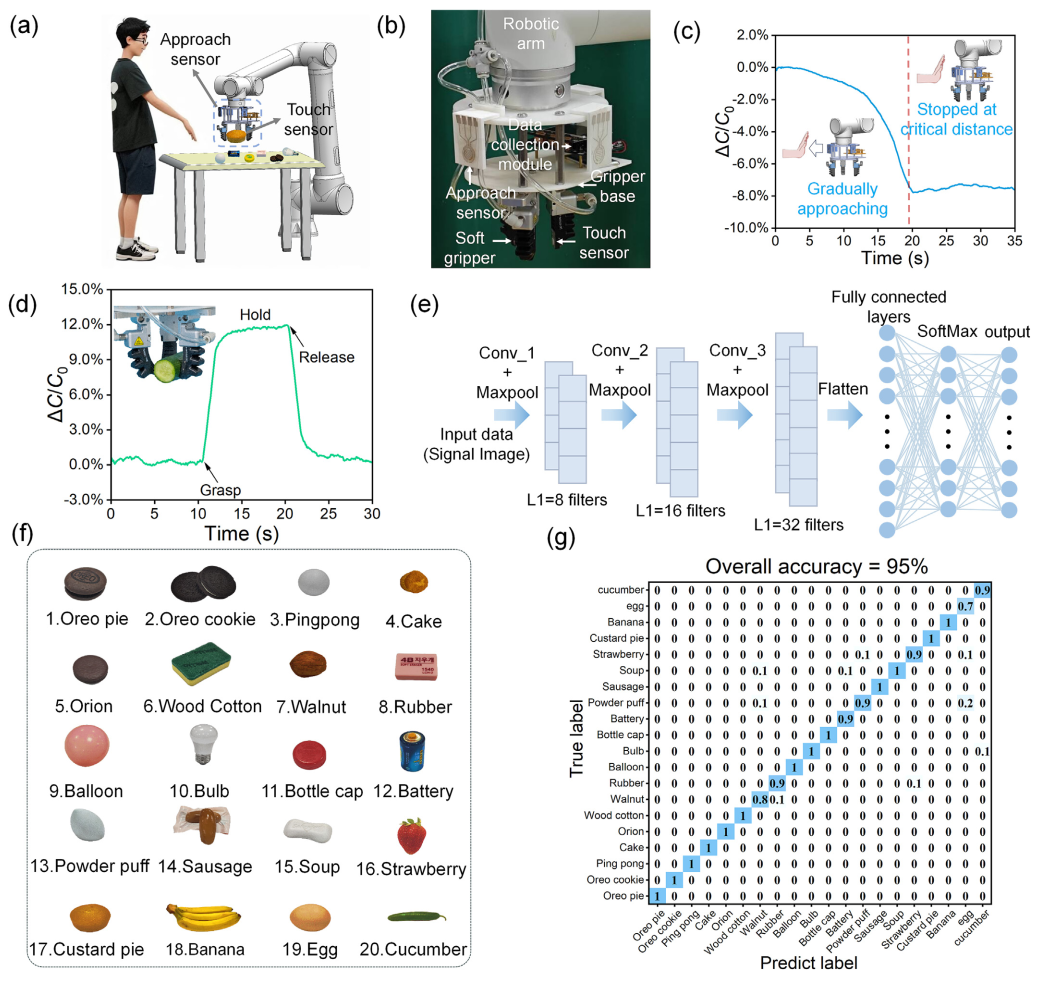
图4. 机器人传感器在与人体碰撞预警及人工智能辅助物体识别中的应用。(a) 示意图,显示集成机器人传感器的可编程机器人臂系统,用于人机交互(HRI)。(b) 展示传感器集成在夹持器指端(用于物体操作监测)和夹持器底座(用于危险碰撞预警)上的情况。(c) 当人手逐渐接近机器人臂并在临界距离1厘米处停止时,传感器的响应信号。(d) 软夹持器在抓取、夹持及释放黄瓜过程中的传感器响应行为。(e)用于物体识别的卷积神经网络(CNN)模型结构示意图。(f) 用于测试的20个不同日常物体的数字图片。(g) 显示20个物体识别准确率的混淆矩阵。
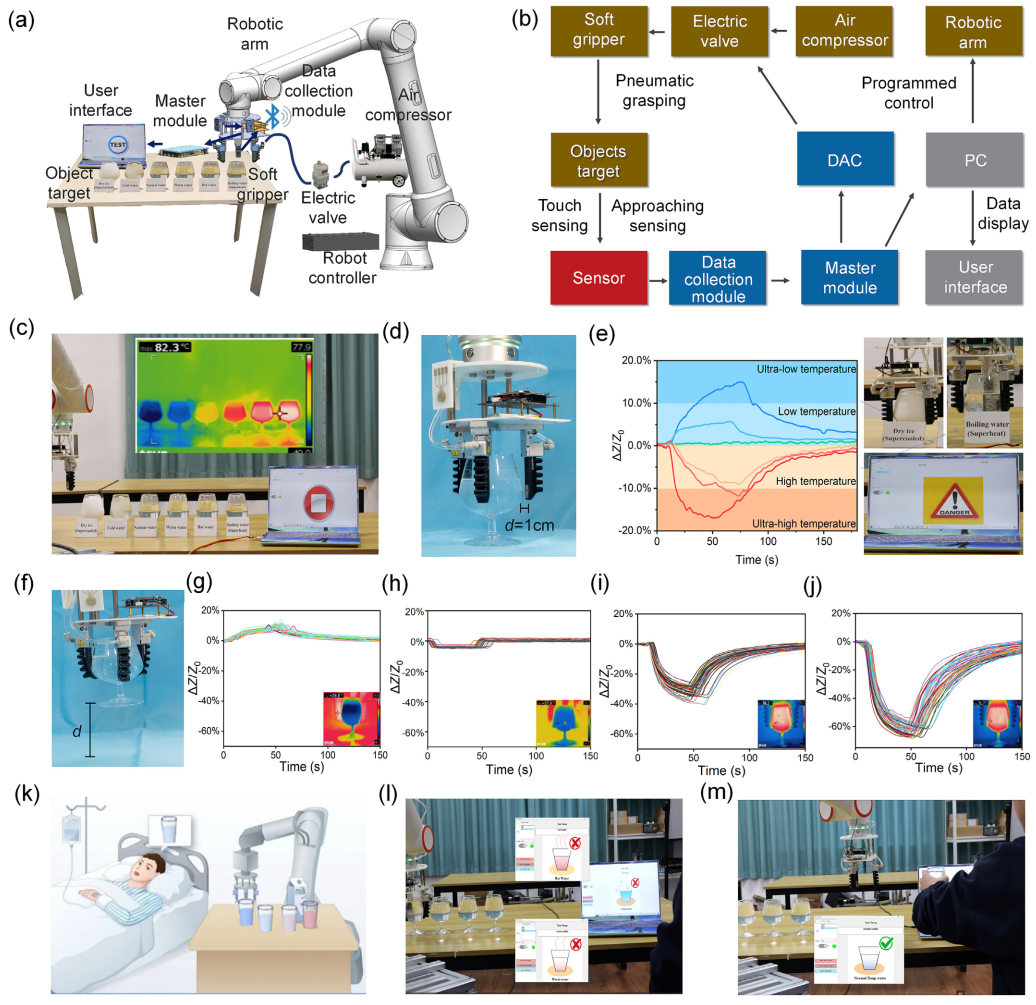
图5. 机器人传感器在热接近感知、热触觉感知和人机交互系统反馈控制中的应用。(a, b) 示意图和框图展示了闭环控制机器人系统的主要组成部分和工作原理,包括传感器数据采集与传输、传感器数据处理与可视化、机器人臂运动的闭环控制以及气动夹具的闭环控制功能。(c) 六个不同温度(−40、0、25、50、75、100 °C)的水杯的光学和红外图像。(d) 照片显示软夹具以最小距离1厘米接近物体进行热接近感知。(e) 在接近六个不同温度水杯时传感器的响应信号。具有特定危险温度的物体(−40 °C在深蓝区域和100 °C在深橙区域)可以被识别,软夹具在后续过程中不会抓取这些危险物体。(f) 照片显示软夹具抓取目标物体。(g–j) 在重复抓取四个安全温度物体(0、25、50和75 °C)50次时的传感器响应信号。(k) 示意图展示机器人系统在床边临床护理中的潜在应用场景。(l, m) 照片显示配备作者传感器的机器人系统,从四个不同温度的水杯中识别并取用适合患者的水(例如,25 °C)。
3.5 机器人传感器的可回收性
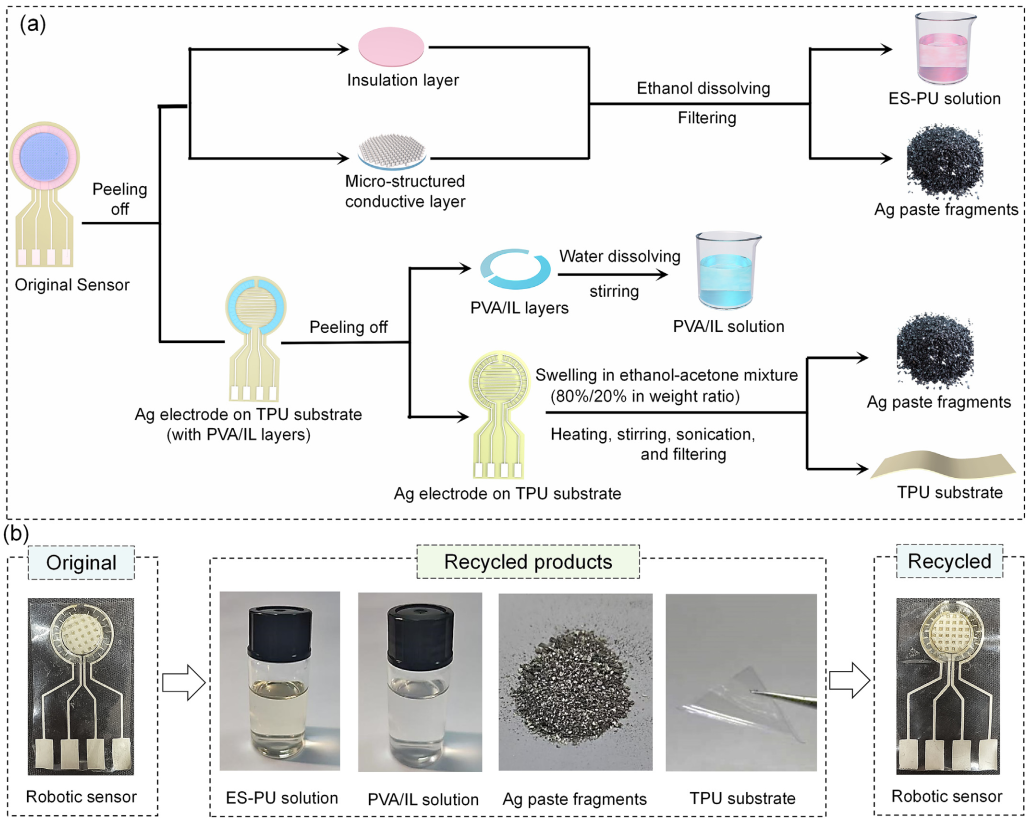 图6. 机器人传感器的回收过程。(a) 示意图展示了基于环保方法的机器人传感器的完整回收过程。(b) 数字图片展示了来自传感器的回收产品,包括ES-PU乙醇溶液、PVA/IL水溶液、银浆碎片和TPU基材。这些回收产品可以再利用于重构新一批机器人传感器。
图6. 机器人传感器的回收过程。(a) 示意图展示了基于环保方法的机器人传感器的完整回收过程。(b) 数字图片展示了来自传感器的回收产品,包括ES-PU乙醇溶液、PVA/IL水溶液、银浆碎片和TPU基材。这些回收产品可以再利用于重构新一批机器人传感器。
四、全文总结
作者成功制备了一种新型内在柔软且完全可回收的机器人传感器,其具有四种传感功能,可用于安全可靠的人机交互。通过协同设计四种不同的传感机制——热辐射效应、热传导效应、电场耦合效应及电容参数调节,实现了集成的四种传感功能,即热接近感知、热触碰感知、空间接近感知和机械力感知。凭借这种多功能性,无论是接触式还是非接触式,都能解析机械和热刺激。此外,该机器人传感器的所有材料均为完全可回收材料,使用后可完全回收,与传统传感器相比,具有更优越的成本效益和环保性能。作为一种有前景的应用,作者展示了一个具有多种功能的可编程人机交互系统(包括危险碰撞警告、物体操作监测、物体识别与分类、非接触温度评估以及接触温度检测)。然而,当前版本的传感器仍存在一些局限性,例如电容信号不够高且易受外部干扰,尚未实现同时四重传感。未来的工作将集中于进一步优化传感器材料和配置,开发数据采集电路,以提高信号的稳定性,并实现四重传感的同时进行。
五、文献信息
Cao, Y. et al. Intrinsically soft and fully recyclable robotic sensors with quadruple sensing functions for reliable human-robot interactions. Science Bulletin S2095927325005249 (2025) doi:10.1016/j.scib.2025.04.075.


