 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



六维力/力矩传感器可同时检测三维空间中的力和力矩分量,为复杂系统提供全面的力信息,广泛应用于航空航天、人机交互、仿生机器人、生物力学及医疗等领域。在机器人交互过程中,意外碰撞或外力冲击十分常见,若缺乏过载保护,六维力/力矩传感器很容易受损,从而导致控制任务失败。因此,六维力/力矩传感器需配备全向机械过载保护结构,以提升其可靠性。
针对当前过载保护结构存在的非全向保护、安装精度难以保证、缺乏物理验证等问题,东南大学宋爱国教授团队设计并开发了一种基于十字梁结构、集成全向过载保护结构的新型六维力/力矩传感器。该传感器在保持高灵敏度的同时,具备优异的过载保护能力。相关研究成果以“A Novel Six-Axis Force/Torque Sensor With Integrated Omnidirectional Overload Protection Mechanism”为题发表在IEEE/ASME Transactions on Mechatronics期刊上。
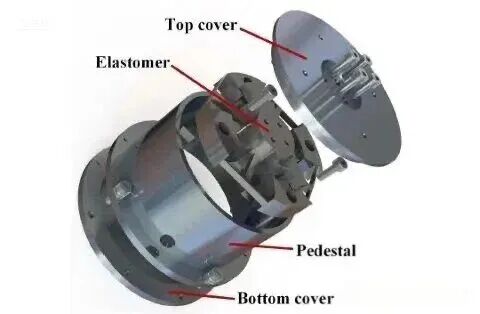
图1 集成全向过载保护结构的六维力/力矩传感器
这项研究提出的集成式全向过载保护六维力/力矩传感器,力测量范围(Fx, Fy, Fz)为± 80 N,力矩测量范围(Mx, My, Mz)为± 4 Nm,并具备至少10倍的过载保护能力。该传感器在± 800 N的力和± 40 Nm的力矩作用下不会发生塑性变形,过载后仍保持较高测量精度。传感器弹性体采用TC4钛合金加工,其余部件采用2A12铝合金,在减轻整体重量的同时有效控制了成本。
研究人员采用序列二次规划(SQP)算法对传感器弹性体简化静态模型进行优化设计,以最大化传感器灵敏度,同时将与过载保护结构相关的尺寸约束纳入优化过程。该过载保护结构通过圆弧限位限制力(Fx、Fy)及力矩(Mz),通过矩形限位结构限制力(Fz)及力矩(Mx、My)。
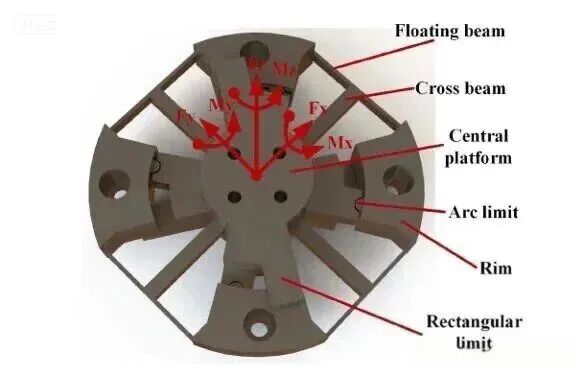
图2 六维力/力矩传感器的弹性体结构
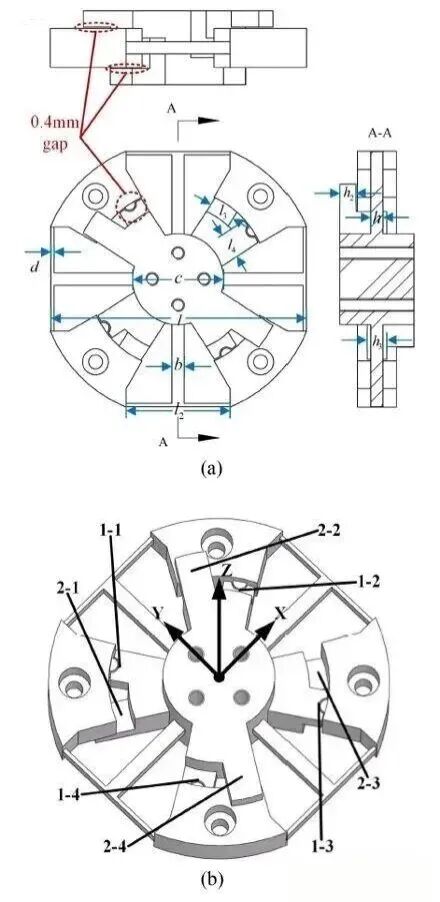
图3 六维力/力矩传感器的过载保护结构:(a)尺寸图(比例1:1);(b)圆弧限位与矩形限位结构
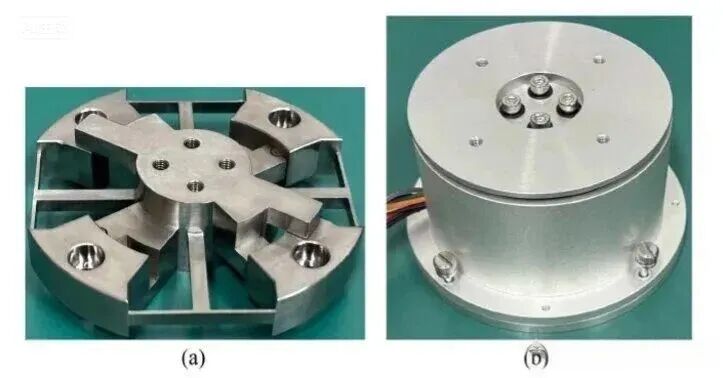
图4 实物照片:(a)弹性体实物;(b)六维力/力矩传感器实物
研究人员首先通过有限元法(FEM)验证了该六维力/力矩传感器的可行性,随后进行静态标定实验并对标定数据进行解耦。实验结果表明,传感器线性精度可达1%,耦合误差低于3%。最后,通过过载保护实验验证了该传感器具备至少10倍的过载保护能力,该保护结构设计灵活,可适用于多种测量系统。
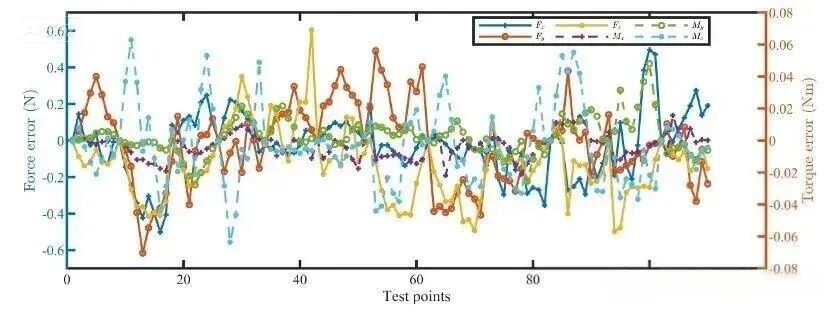
图5 六维力/力矩传感器精度测试数据误差曲线
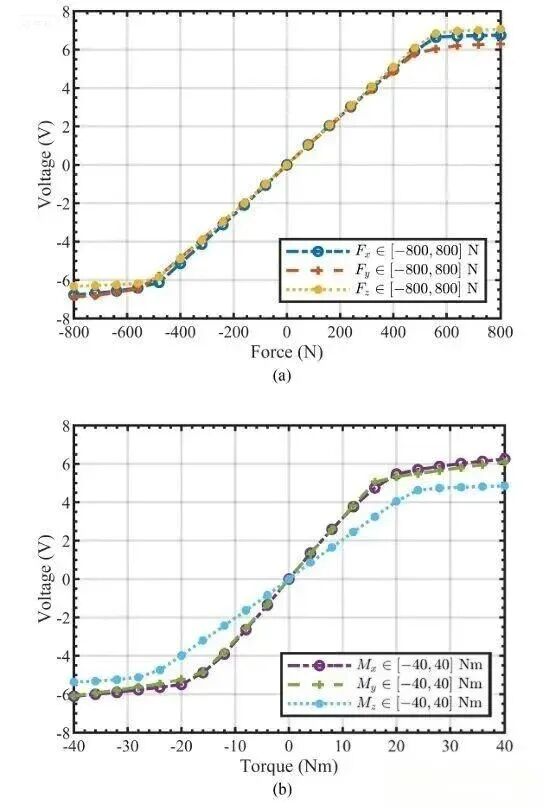
图6 六维力/力矩传感器过载保护实验:(a)Fx、Fy、Fz力加载;(b)Mx、My、Mz力矩加载
综上所述,这项研究基于经典十字梁结构,设计了一种集成全向过载保护结构的新型六维力/力矩传感器,并验证了其在机器人与环境交互过程中的可靠性与鲁棒性。这一成果对提升实际应用中机器人的性能与稳定性、保障人机协作的安全性与可靠性具有重要意义,在手术机器人、航空航天及汽车工业等领域具有广阔应用前景。此外,该保护结构也可适配于其它类型的应变式弹性体,具备良好的通用性与扩展性,为高可靠性机器人交互提供了关键技术支撑。


