 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。


据中国科学院苏州纳米所官微消息,近期,苏州纳米所陆书龙团队基于GaN材料外延与器件工艺方面的积累,在氮化镓基单片集成器件领域取得了重要进展。
进展一:设计并验证双向光电流机制
传统半导体 p-n 结的单向导通特性限制了具有双向光响应能力器件的集成。此研究通过在 p-GaN/(In,Ga)N 异质结中引入水凝胶/p-GaN 局部接触界面,在单一器件内构建了双异质结结构(图1)。所研制的双功能器件在 365 nm 和 520 nm 光照下分别表现出负和正的光电流,成功实现了对不同波段光照的双向光电流响应。该研究为面向复杂应用场景的一体化光电子芯片提供了一种可行的思路。
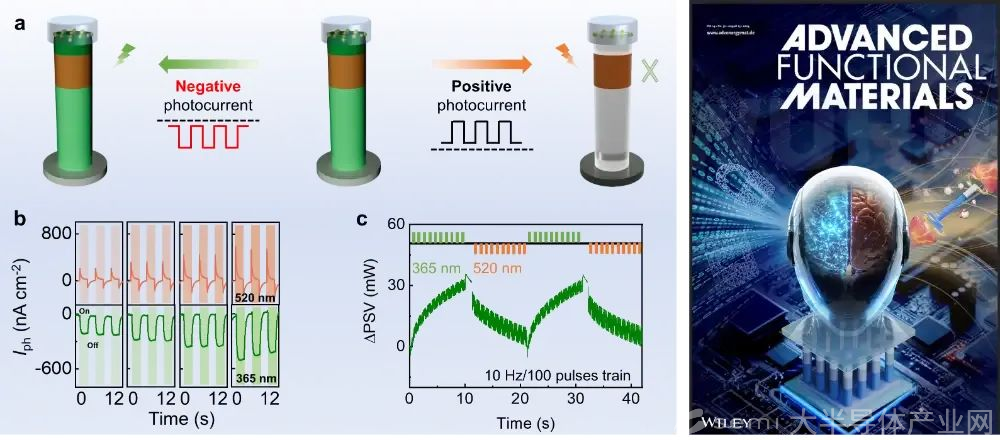
图1:器件设计原理及双向响应特性(左);该工作入选为期刊正封面(右)
进展二:探测/突触双功能智能传感与人形机器人应用验证
光电探测器需要快速响应光线变化,而人工突触器件则需要更长时间来处理和存储信号,所以光电探测器很难像突触器件那样记忆图像或处理光信号。简而言之,两者反应速度的快慢差异太大,难以整合到同一个器件里高效协同工作。另一方面, GaN纳米线常用的硅衬底材料在紫外和可见光范围是不透明的,这会导致其难以用于制备透明全向探测器。因此,基于GaN纳米线的探测/突触双功能全向器件,至今难以研制成功。
此工作采用电化学剥离技术移除硅外延衬底,并在透明基底上构建了“界面-体相分离”结构,包含石墨烯/(Al,Ga)N异质结功能区和GaN功能区,首次实现了自驱动360°全向GaN基探测器与人工突触的单片集成,成功在单一器件中融合“快速响应”与“慢速弛豫”特性(图2a和2b)。同时,团队率先验证了此新型双功能器件在人形机器人领域中的应用潜力(图2c),有助于提高人形智能机器人的智能感知与计算能力,并降低功耗。
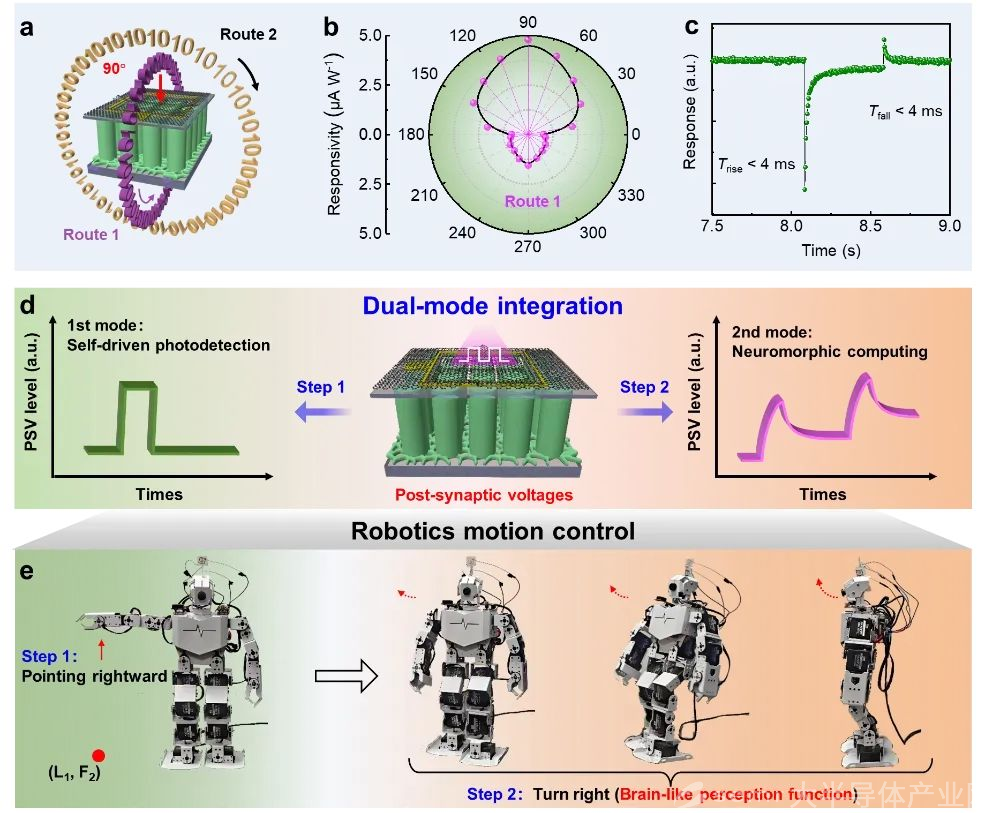
图2:(a-c)全向探测模式示意图与实验测试数据,(d)探测突触双模单片集成示意图,(e)机器人智能感知应用验证
上述工作得到了半导体显示材料与芯片重点实验室、纳米真空互联实验站(Nano-X)等支持,也得到了国家自然科学基金、江苏省和苏州市项目等科研项目资助。


