 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



自动驾驶进入攻坚期,三维感知系统成为智能驾驶"感官中枢"。本期介绍毫米波三维感知:鬼探头解决方案。
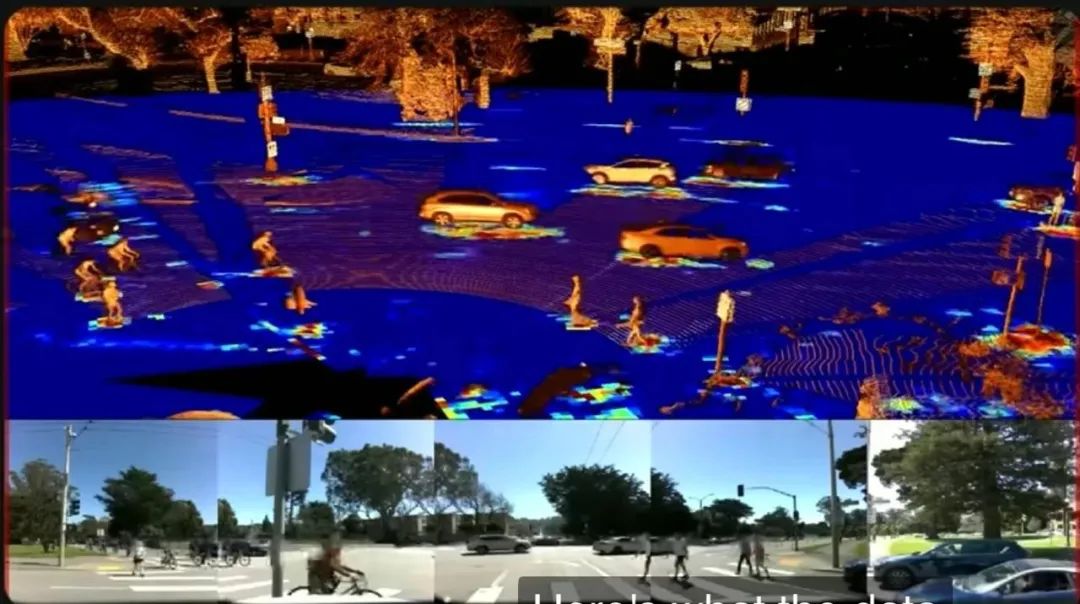
鬼探头解决方案之毫米波三维感知
毫米波雷达采用调频连续波(FMCW)技术探测物体。在特定条件下可通过多径反射间接探测被部分遮挡的物体。传统毫米波雷达通常采用2发4收的天线配置,无法提供物体的高程信息,且分辨率相对较低,因此在早期自动驾驶系统中主要作为视觉感知的辅助传感器。
当前,先进的成像毫米波雷达正被越来越多地应用于自动驾驶系统。这类雷达通过增加发射和接收通道(如8发16收等配置),可获取更丰富的3D点云数据,显著提升角度分辨率和目标分离能力。其高精度的三维感知数据能够与摄像头、激光雷达等传感器进行前融合,有效提升系统的环境感知精度和鲁棒性。
01 常规毫米波雷达 Radar
1.1 常规雷达基础原理
雷达(Radio Detection and Ranging)通过发射77GHz电磁波并接收目标反射信号实现目标探测。其核心原理包括:
1)测距:采用调频连续波(FMCW)技术,通过发射信号与回波频率差计算目标距离(公式:R=c⋅Δf2BR=2Bc⋅Δf,其中BB为带宽)。制约探测距离的因素主要是ADC采样频率,主要受ADC硬件的限制。而测距分辨率仅与带宽有关,比如4GHz的调频波下,测距分辨率可达3.75cm。
2)测速:基于多普勒效应,通过回波频率偏移获取目标相对速度。最大可测速度取决于线性调频脉冲的时间,后者越小,前者越大。速度分辨率与波长成正比,与连续调频波时长成反比,与FFT的连续数成反比。
3)测角:利用相位差法,通过多天线阵列的相位差计算方位角(公式:θ=λ2πd⋅Δϕθ=2πdλ⋅Δϕ)。波长λ越小,角度分辨率越高。天线正前方的位置,θ越小时,其分辨率越高,越靠视场角外侧,θ越大时,分辨率越低。增大接收天线RX之间距离,增加采样的通道个数,增大接收器之间的距离,增大采样通道个数,可以提高升雷达角分辨率。
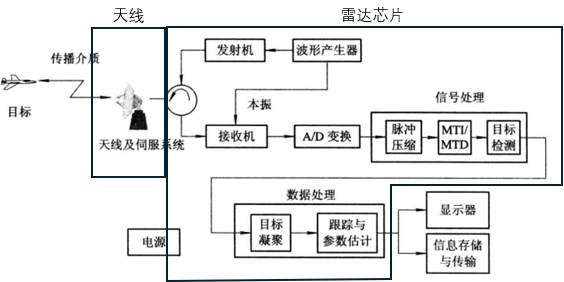
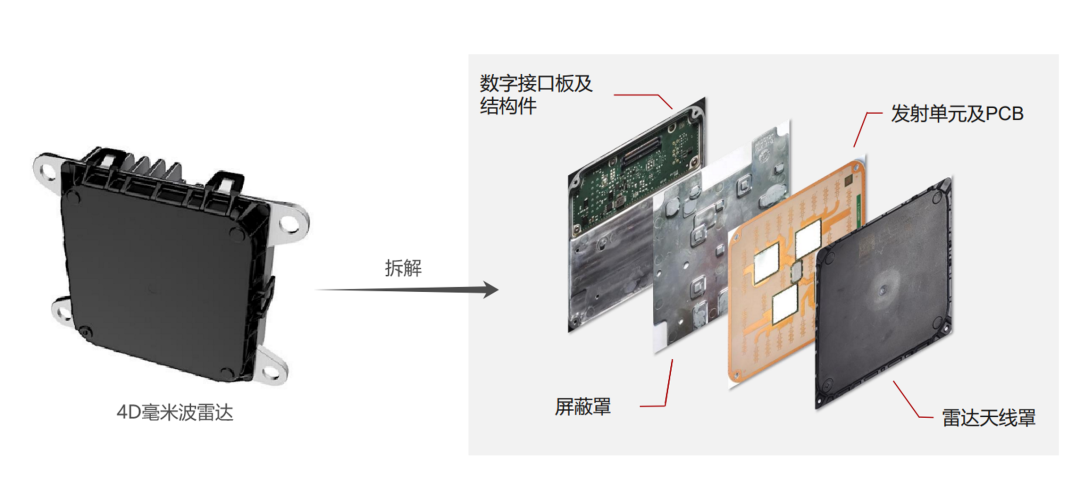
1.2 雷达系统结构
当前毫米波雷达集成化程度非常高,典型雷达系统由 1)雷达芯片和2)天线两部分构成。
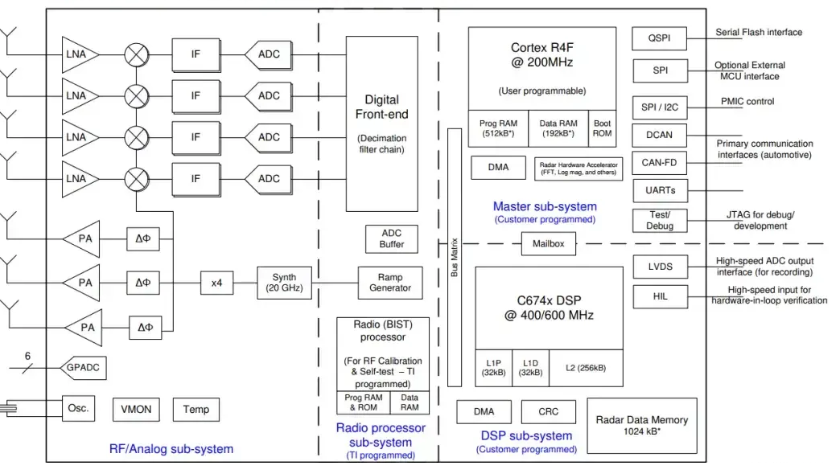
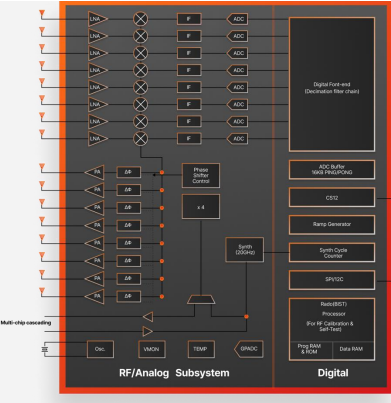
1)芯片方案
以TI AWR2944为例,毫米波雷达的中射频电路,VCO,ADC 和 MCU,DSP 均集成在单颗芯片内。
2)天线方案
(1)微带天线:
结构:贴片天线(矩形/圆形)、缝隙天线、行波天线。
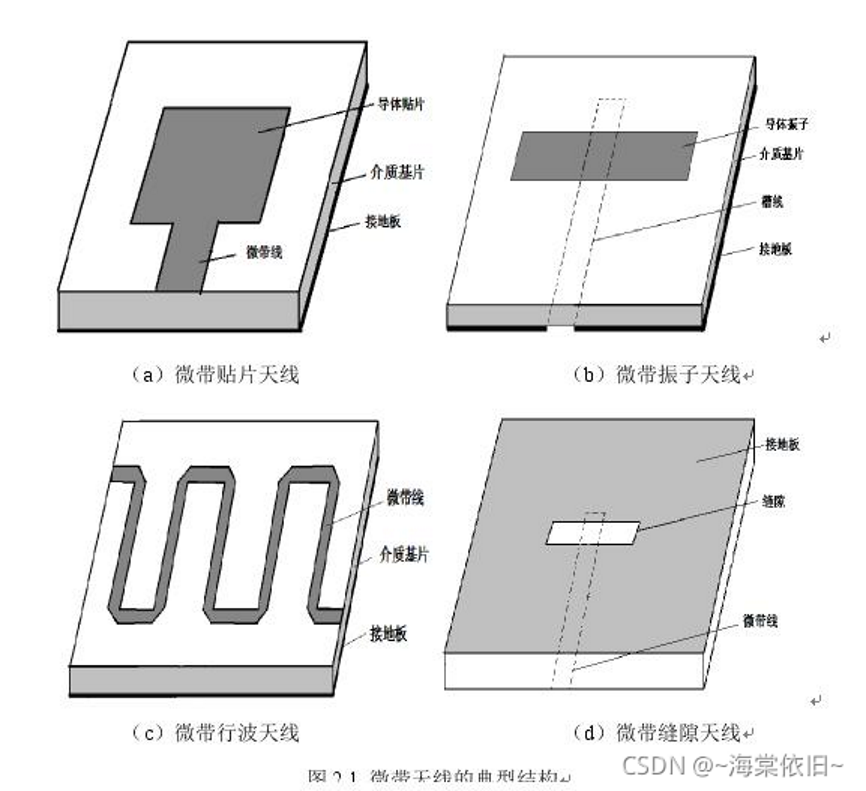
特点:77GHz下传输损耗高达0.7dB/10mm,随着传输线的增长,馈线损耗逐步增大,40mm馈线损耗达3dB,探测距离受限(约200米)。
(2)波导天线:
结构:采用Launch On Package(LoP)技术,通过PCB波导直接传输信号。
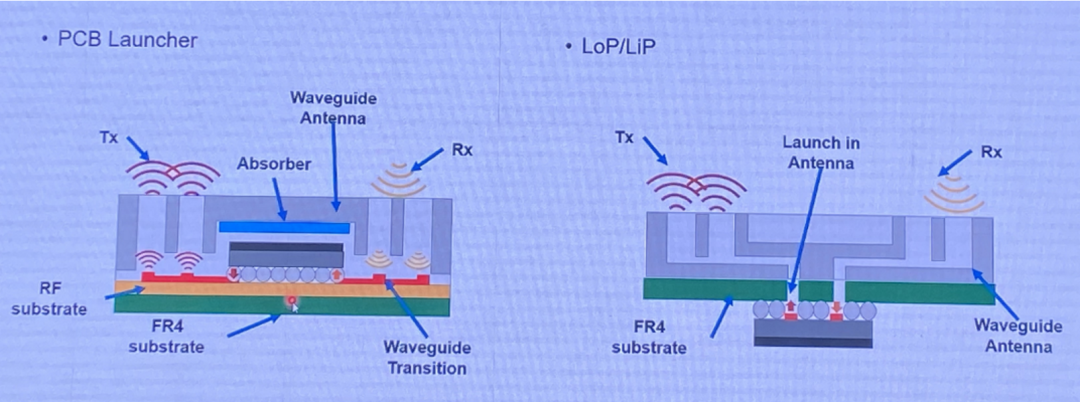
特点:损耗仅0.002dB/10mm,探测距离可达400米,信噪比提升11dB。
雷达角分辨率很大取决于天线方案和设计, 波导天线相对微带天线产品,距离分辨率和精度提升25% ;FOV提升;对弱小目标的探测能力提升30%以上;方位精 度提升50%以上;俯仰分辨率可提升25%;俯仰精度可提升100% 。
02 成像毫米波雷达 Image Radar
2.1 Image Radar的技术突破
1)核心定义
Image Radar(4D雷达)通过多输入多输出(MIMO)技术,在传统3D雷达(距离、速度、方位角)基础上增加高程维度,输出4D张量(距离×速度×方位×高度),实现高密度点云成像。也叫4D毫米波雷达。
2)关键技术实现
(1)MIMO虚拟孔径:发射天线与接收阵列协同工作,在垂直方向形成虚拟孔径,实现高程测量。
(2)软件增强:
(3)数据格式创新:
2.2 Image Radar芯片方案对比
要增加雷达的发射和接收通道,必然要采用天线集成能力和数据处理能力更强的芯片。当前成像雷达的芯片方案包含1)级联和2)单芯片两种。
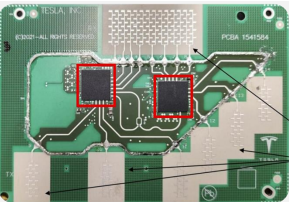
1)级联方案(Cascading)
(1)方案:将2个集成到1个板子实现多发多收,如Tesla 3T4R(3发射通道×4接收通道)。
(2)优势:
(3)挑战:
2)单芯片方案(Monolithic)
(1)方案:使用一颗芯片实现多发多收。如牧野8T8R(8发射×8接收通道集成单芯片)。
(2)优势:
(3)技术难点:
(4)未来趋势
03 三维感知技术小结
3.1 各传感器对比
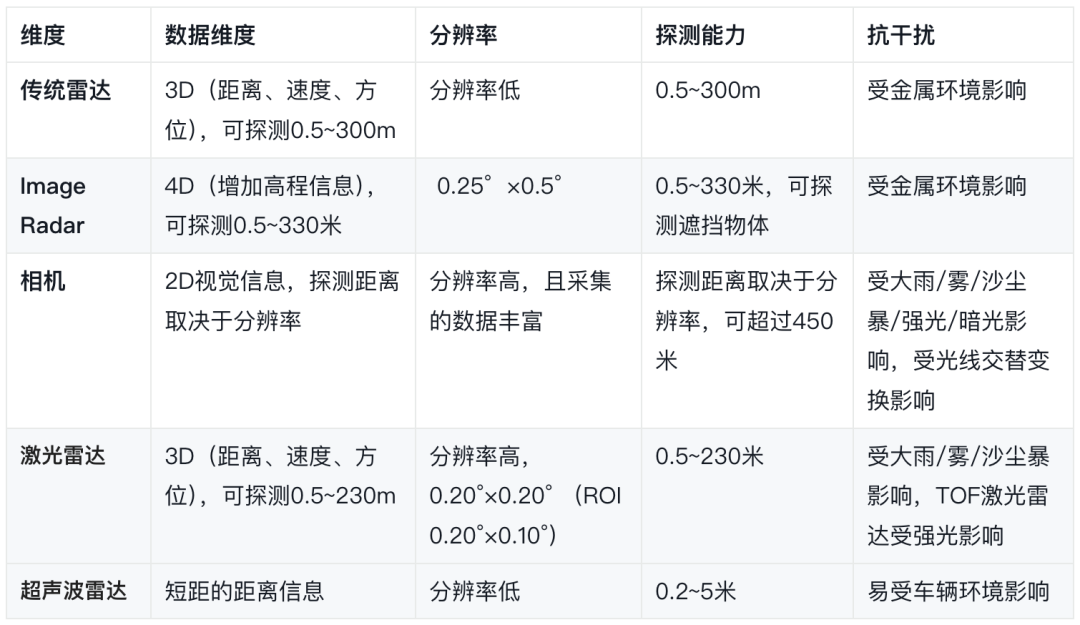
重点
1)双目相机提供丰富的环境信息: 这是其核心优势,为自动驾驶系统理解场景(识别物体、理解语义)提供了不可替代的基础数据。但其三维感知的有效性高度依赖良好的光照和天气条件。
2)激光雷达适应暗光和强光环境: 作为主动传感器,激光雷达不依赖环境光,能在夜间、隧道、强逆光等双目相机失效的场景下提供高精度的三维点云,极大地提升了感知系统的鲁棒性。成本是其广泛部署的主要障碍。
3)成像毫米波雷达可以探测到被遮挡的物体: 得益于毫米波的一定穿透能力和先进的信号处理技术(尤其是4D成像雷达),它能够探测到部分被前方车辆、高架桥墩等遮挡的物体轮廓和速度。结合其精准的测速能力和全天候工作特性,使其成为应对“鬼探头”等极端危险场景的关键传感器,潜力巨大。其信息丰富度(语义、细节)仍是短板。
3.2 总结
没有单一的传感器能完美解决自动驾驶的所有三维感知需求。实际应用中,这三种传感器(以及单目相机、传统毫米波雷达、超声波雷达)是互补和融合使用的:
通过传感器融合技术,结合各自的优势,弥补各自的劣势,才能构建出在复杂多变环境下稳定、可靠、安全的自动驾驶三维感知系统。任何单一传感器的系统,必然有其短板。根据墨菲定律,这些短板最终会带来交通事故。
