 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



深度感知是实现 3D 测绘、物体识别、空间感知等高级认知功能的基础技术。对于需要精确实时处理环境与物体的形状、位置和运动的领域,这项技术不可或缺。通过深度感知技术,可以准确获取目标物体的位置信息,有助于实现自适应和智能化操作。
安森美的 iToF 方案:Hyperlux™ ID
常规的间接飞行时间 (iToF) 技术尽管潜力巨大,但在实际应用中仍面临挑战。为了解决这一难题,安森美开发了 Hyperlux ID 高性能 iToF 传感器系列。该系列运用先进的像素和堆叠技术及多种特性,拓展了 iToF 方法的应用范围。下面介绍 iToF 的原理和 Hyperlux ID 感知系列的主要特性。
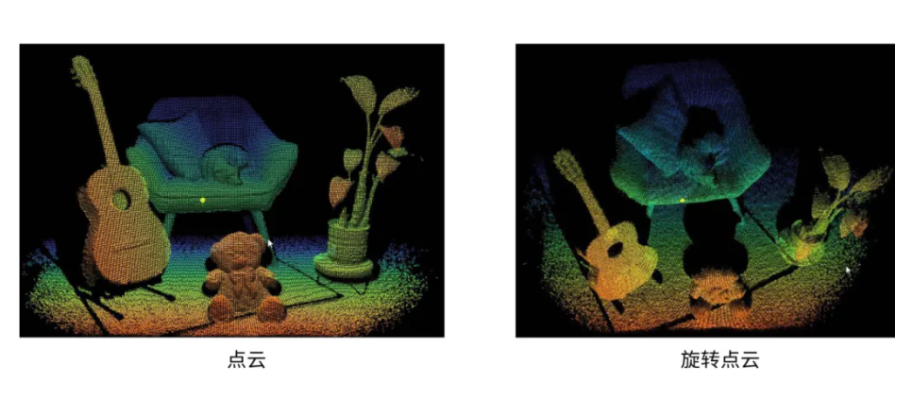
图 1. Hyperlux ID 获取的深度点云图像
iToF 的原理
如前所述,间接飞行时间 (iToF) 法通过接收以特定频率调制的照射光的反射波并计算相移来确定深度。为了确定相移,采用四个调制信号进行测量,其相位分别偏移 0°、90°、180° 和 270°。因此,至少需要四次曝光才能获得单个深度帧信息。
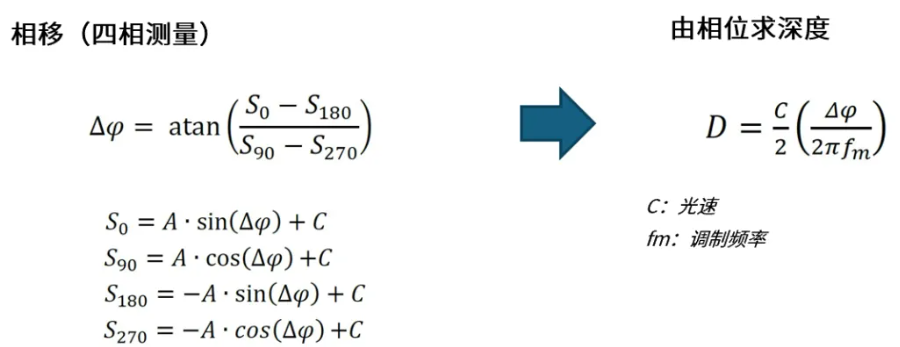
图 2. iToF 计算
iToF 根据相移来计算距离。相位周期由调制频率决定,相位具有周期性。当与目标的距离超过一个周期时,就会出现相位模糊问题,即无法判断测得的相位属于哪个周期。例如,若调制频率为 60MHz,则一个周期为 2.5 米。在这种情况下,测量距离 3 米将被解释为 0.5 米。因此,最大可测量深度一般在调制频率的一个周期以内(0 至 2π)。
Hyperlux ID 的主要特性
提升分辨率和距离精度
安森美开发了名为 Hyperlux ID 的 iToF 传感器系列。该系列包含AF0130 和 AF0131 两款产品,具有 120 万像素的高分辨率。此分辨率相当于目前市面上大多数 iToF 传感器分辨率 (VGA) 的四倍,因而能够实现更精确的测量。
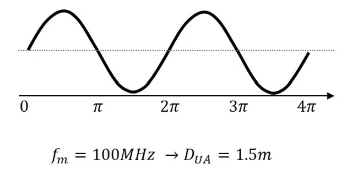
此外,这些产品还支持像素合并。如果 VGA 分辨率足够,那么将 120 万像素进行像素合并,可以提高 VGA 传感器的灵敏度。距离分辨率取决于调制频率。与市面上的常规方案相比,我们的产品可以使用相对较高的 200MHz 调制频率。因此,我们的产品性能可扩展,既支持短距离、高精度感知,也支持长距离、高分辨率感知。
图 3. 近距离高精度感知示例
集成深度计算功能(减小系统尺寸并降低成本)
常规 iToF 传感器不具备根据四个相位的曝光结果来确定深度距离的计算能力。确定深度距离的过程必须由外部 FPGA 或处理器执行。这些 FPGA 或处理器将 iToF 传感器输出的每个相位的曝光结果存储在帧存储器中,并在收集到所有四个相位的数据后执行深度计算。因此,客户需要确保系统具备足够的处理能力和存储器来支持 iToF 计算。
我们的新产品 AF0130 集成了深度计算功能。客户无需准备大量的处理资源,系统也得以简化。如果之前使用了 FPGA 等专用计算器件,那么现在可以移除这些器件,有助于减小摄像头的外形尺寸。如果过去使用了高性能处理器,现在可以将计算资源分配给其他应用,或者换用更具成本效益的处理器。当分辨率较高时,我们的新方案会更加有效。
iToF 需要至少四个相位的数据,因此与常规图像传感器相比,它会产生四倍以上的数据输出。由于计算在 iToF 传感器端进行,数据速率可以显著降低。它还能提升电路板设计的灵活性。此外,如果客户希望使用自己的计算算法,我们还提供未集成计算功能的 AF0131。
减少运动伪影
常规 iToF 传感器在每次相位曝光后,都会将数据读出到外部处理器。从第一次 φ0 曝光到 φ270 曝光完成,需要一定的时间。如果目标物体在此期间移动,则感知结果中会出现运动伪影。Hyperlux ID 内置存储器,可以保留必要的相位数据。这里的技术突破在于,所有四相信息都直接存储在像素中。曝光结果原封不动地存储在像素存储器内。因此,下一相位曝光可以在很短的时间内开始,从而减少了四个相位的总曝光时间,运动伪影得以大幅减少。
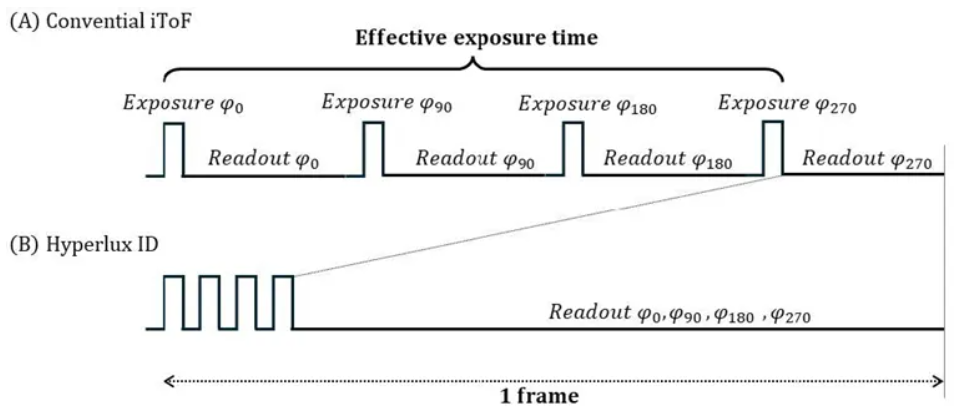
图 4. 减少运动伪影机制(1 帧)
长深度距离和高环境光抑制
·双频模式:常规 iToF 传感器的典型感知范围为 5 到 10 米左右,而且由于易受环境光干扰,因此通常仅限于室内使用。前面提到过,iToF 可测量的深度范围一般为调制频率的一个周期。为了扩大测量范围,可以使用融合两种调制频率的方法。由于使用两个调制频率,因此可以区分的最大距离为这两个频率的最小公倍数。这种方法由来已久,但常规 iToF 传感器处理四个相位时,要求每帧改变一次调制频率,再由系统合并。结果,最终的帧速率会减半,创建单个深度帧的曝光时间会延长。Hyperlux ID 有能力在单帧内处理两个调制频率,因此无需外部处理,帧速率不会降低。此外,通过使用像素存储器,两个调制频率的八个相位曝光所需的时间可以缩短。因此,不仅感知范围得到扩大,而且运动伪影也得以有效减少。(不过,此款产品使用双频时的最大分辨率为 VGA。)
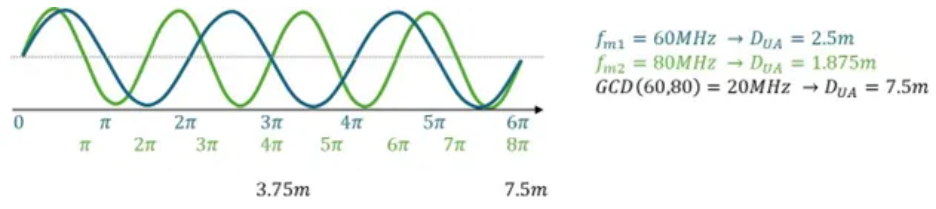
图 5. 双频模式
·提高灵敏度:假设用于发射的激光是 940nm 波段的激光。在该频段,常规 iToF 产品的典型 QE(量子效率)为 20% 至 30%,但 Hyperlux ID 得益于安森美先进的像素技术,已达到 40% 以上。随着测量距离增加,反射波的能量减小,因此灵敏度的改善非常有助于提高深度测量距离和精度。此外,在双频下,由于像素合并,最大分辨率变为 VGA,但这也改善了传感器灵敏度,有助于提高深度测量距离和精度,就像 QE 一样。
·增强环境光抑制:一般来说,iToF 容易受到阳光等环境光的干扰。发射激光以外的光源也会影响测量,导致结果不准确。因此,iToF 通常仅限于室内使用。我们的产品增强了环境光抑制能力。即使在阳光下,它也能获得准确的深度结果。
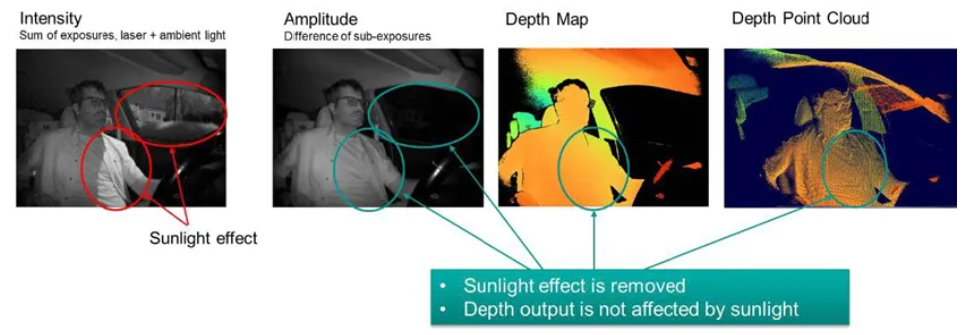
图 6. 环境光抑制效果
混合模式:常规 iToF 传感器使用调制的连续光波,要求快门在测量期间保持打开,而这会导致环境光成分不断在像素中积累。此外,若要测量更远的目标,必须提高激光功率。在这种情况下,激光能量非常强,会照射到附近的目标上,产生强烈的反射光,可能导致像素饱和。因此,进行大范围测量非常困难。Hyperlux ID 采用了安森美的全局快门技术和专利混合技术。它使用基于测量距离的专门调制,并且仅在必要时打开全局快门,从而有效减少了环境光成分的积累。这样可以最大限度地利用像素灵敏度,实现从近距离到远距离的宽范围测量。目前,室内和室外都能获得超过 30 米的测量结果。
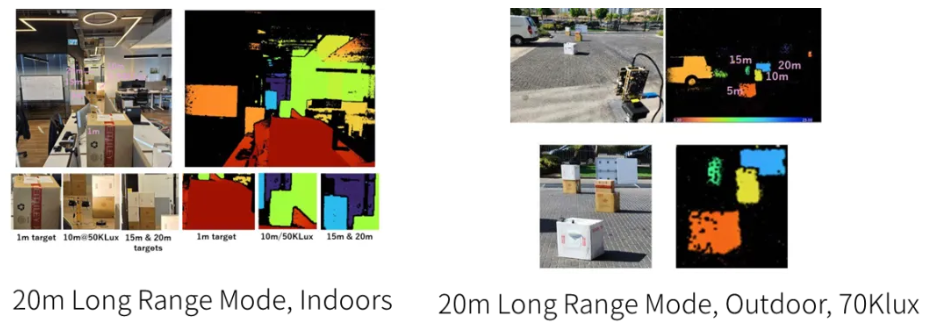
图 7. 30 米长距离模式,室内和室外场景
Hyperlux ID 间接飞行时间 (iToF) 技术的应用
Hyperlux ID 提升了距离感知的分辨率和精度,无论近距离还是远距离(最远 30 米),都能实现更准确的测量,通过应用于工业、商业、消费领域的各种深度感知场景,有助于提高深度感知性能。
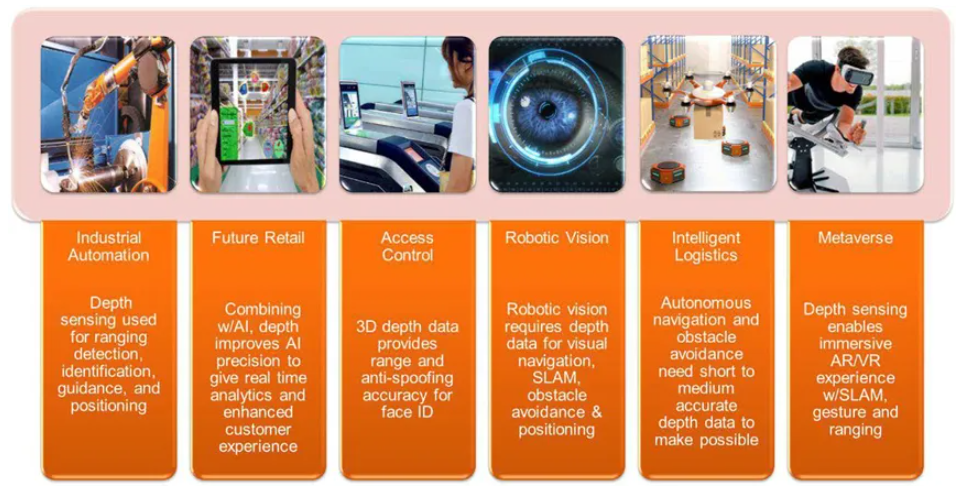
图 8. 应用示例
综上所述,安森美的高性能 iToF 产品系列作为全新 Hyperlux ID 系列的一部分,颠覆了关于 iToF 方法的传统观念。 该系列产品拓宽了 3D 感知的应用范围,并有助于提升工业自动化、机器人、安防等众多领域的自动化水平。


