 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



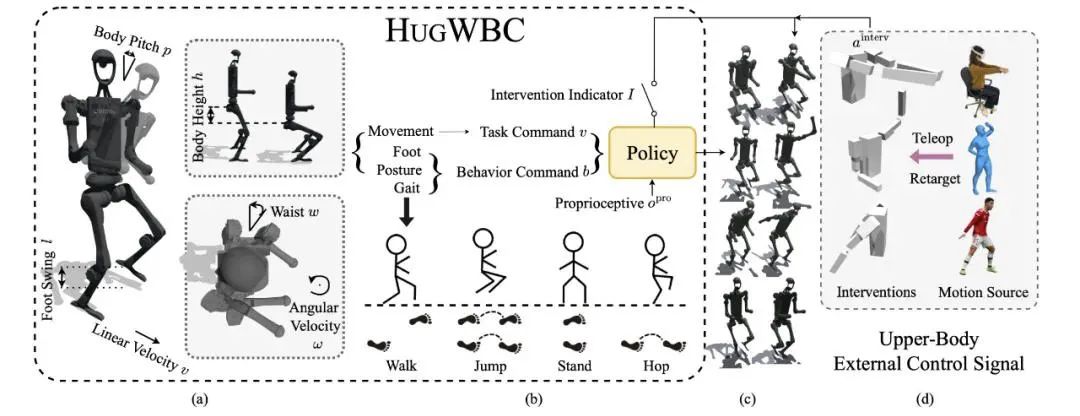
2025年2月,上海交通大学与上海人工智能实验室联合发布了一项名为HugWBC(Humanoid Unified Whole-Body Controller)的创新技术。该技术通过扩展指令空间、结合控制理论与强化学习,实现了对机器人步态、姿态、动作的细粒度控制,并支持实时外部介入操作。HugWBC不仅突破了传统机器人控制器的功能局限,还为未来人形机器人在工业、医疗、救援等复杂场景中的应用奠定了技术基础。
一、HugWBC的技术架构与核心创新
1. 扩展指令空间:从单一指令到多维度控制
传统人形机器人控制器通常仅支持速度或关键点跟踪,而HugWBC提出了一个包含“任务指令”和“行为指令”的扩展指令空间:
“任务指令”:以移动速度为核心,涵盖线速度、角速度等参数,支持机器人完成基础运动任务。
“行为指令”:细分为姿态、脚步和步态三类,实现了对机器人运动的精细化调控:
“姿态指令”:包括身体高度、前倾角、腰部转动角等,可调整机器人整体姿态以适应不同地形。
“脚步指令”:通过步频、最大摆动高度等参数控制步幅与步态节奏。
“步态指令”:基于相位变量、相位差和占空比(足部腾空时间占比),生成行走、奔跑、跳跃等多种步态。
这种设计使机器人能够像人类一样灵活切换步态,例如从单脚跳跃到跑步的丝滑过渡,甚至在高动态运动中保持平衡。
2. 对称性与自然运动奖励机制
人形机器人的对称结构是高效运动的基础,但传统方法难以自动探索对称性优势。HugWBC引入了“对称奖励函数”,通过镜像函数和损失函数,强制策略生成对称且自然的运动轨迹。例如,机器人在行走时左右腿的动作会被自动对齐,减少能量消耗并避免不协调的“跛行”现象。
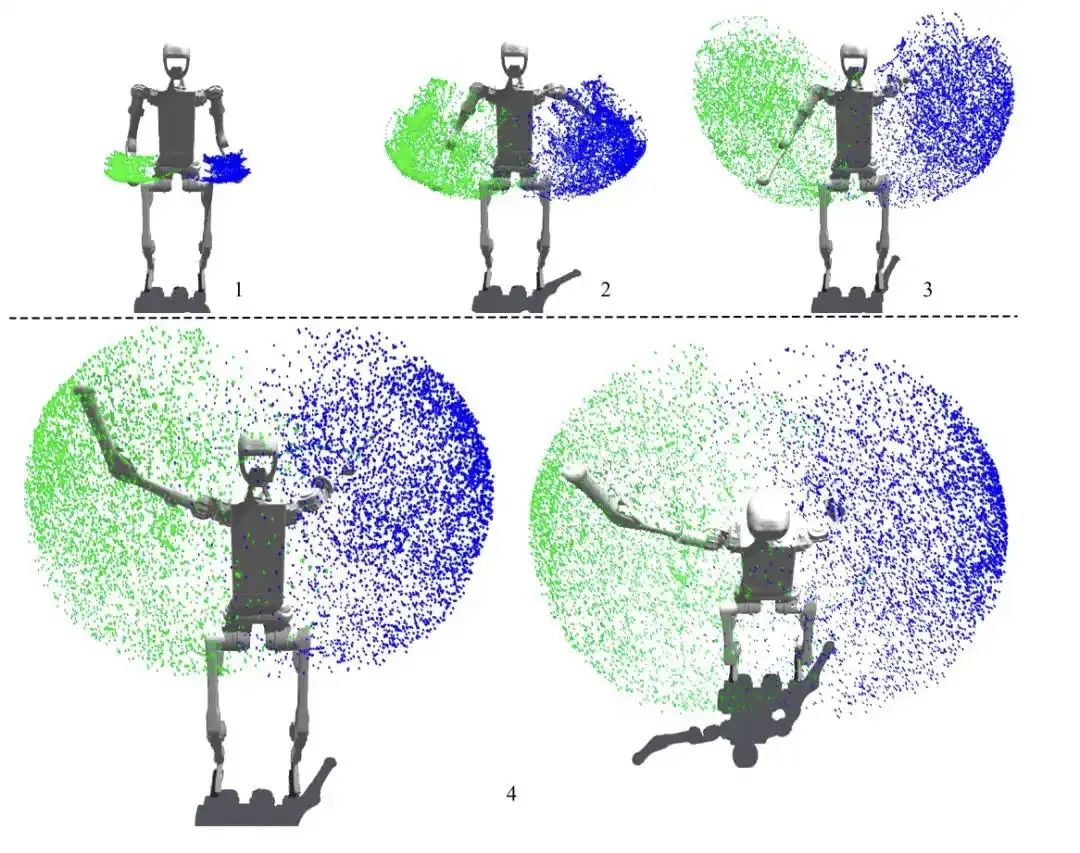
3. 鲁棒性训练与上肢介入支持
为了应对复杂环境中的扰动,HugWBC设计了“噪声课程训练”:在模拟环境中对机器人上肢施加随机干扰(如外力推拉或遥操信号),使其学会在动态干扰下保持稳定性。实验表明,经过训练的控制器在干扰测试中的跟踪误差比基线方法低30%以上。
此外,HugWBC允许外部控制器实时介入上肢动作,例如在搬运物体时,用户可通过遥操调整手臂姿态,而机器人下半身仍能自主维持平衡,为“移动操作任务”提供了可能。
4. 混合控制与强化学习框架
HugWBC采用“非对称强化学习算法”,在仿真环境中训练策略后直接部署到实体机器人。其训练框架结合了两种关键奖励机制:
“接触-摆动奖励”:引导足部在触地阶段保持稳定,腾空阶段快速摆动。
“足端轨迹奖励”:优化足部运动轨迹,减少与地面的摩擦和碰撞。
这种混合方法显著提高了策略的泛化能力,使机器人能在不同地形和速度下保持高精度控制。
二、实验验证与性能优势
1. 指令跟踪精度分析
研究团队对比了四种步态(行走、站立、双脚跳、单脚跳)的跟踪误差:
行走与站立:误差最低(平均位移误差<0.1米),适合精细操作任务。
跳跃类步态:误差较高(约0.3米),但通过延长训练时间可逐步优化。
在高速运动(>1.5 m/s)时,控制器会优先保障动态平衡,适度牺牲部分跟踪精度。
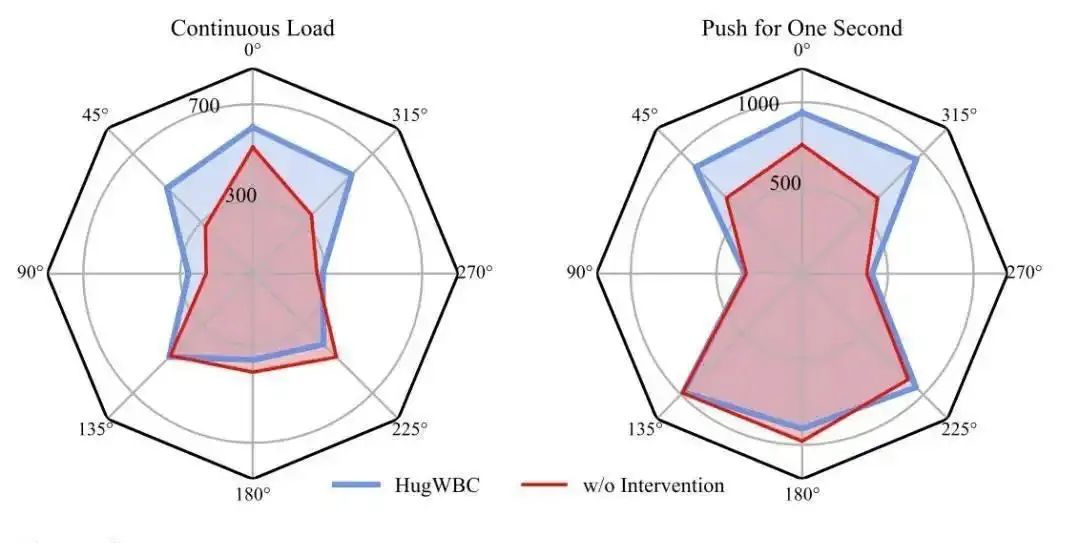
2. 鲁棒性测试
上肢扰动测试:HugWBC在手臂随机摆动时仍能保持下半身稳定,足端移动距离较基线减少50%。
外部冲击测试:模拟机器人被外力撞击后,其恢复平衡的速度比未训练策略快2倍。
3. 指令组合的交互影响
通过热力图分析,研究团队揭示了指令间的耦合关系:
抬脚高度与步频:需在特定区间组合才能实现最优表现。
身体俯仰角与高度:调整俯仰角时需同步修改身体高度以维持重心稳定。
这些发现为未来多指令协同优化提供了理论依据。
三、应用场景与未来展望
1. 工业与物流领域
HugWBC的精细化控制能力使其适用于工厂环境中的货物搬运、设备检修等任务。例如,机器人可一边行走一边调整手臂姿态,精准抓取传送带上的零件。
2. 救援与危险环境作业
在火灾或核污染场景中,HugWBC的鲁棒性允许机器人在崎岖地形中快速移动,并通过遥操完成阀门开关、障碍清除等操作。
3. 人机协作与家庭服务
结合数字孪生技术(如实时映射与仿真推演),HugWBC可进一步扩展为家庭助手机器人,协助老人起居或完成清洁任务。
4. 学术研究的推动
HugWBC的开源框架(项目主页已公开)为机器人学社区提供了新工具,可能催生更多关于步态生成、全身控制的研究。
四、挑战与改进方向
尽管HugWBC展现了卓越性能,仍需解决以下问题:
1. 能耗优化:高动态运动对电池续航提出挑战,需结合轻量化设计与能量回收机制。
2. 复杂地形适应:当前实验主要针对平坦地面,未来需扩展至斜坡、楼梯等场景。
3. 多机器人协同:如何将单机控制扩展至群体协作,仍需探索通信与任务分配算法。
上海交通大学HugWBC的推出,标志着人形机器人运动控制从“单一功能”迈向“通用智能”的关键一步。其技术框架不仅填补了细粒度控制与实时介入的空白,更为人工智能与实体世界的深度融合提供了范例。随着后续研究的推进,HugWBC有望成为人形机器人领域的“操作系统级”平台,赋能千行百业的智能化转型。


