 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



背景介绍
随着侦察机器人的小型化和柔性化,人们迫切需要一个相应的微型柔性传感系统来提高其在复杂多变环境中的适应性。环境感知和微运动检测是侦察机器人满足救灾、军事防御、海洋勘探、矿产资源开发等多功能应用的两项必要功能。首先,作为环境感知的最重要方面之一,精确的流量检测通常基于悬臂结构,其灵感来自自然界中的机械敏感毛发传感器,如海豹的胡须、蜘蛛腿上的感觉毛发、蝙蝠的翅膀等。然而,在低流量条件下,悬臂梁的弯曲变形非常小,这使得低速流量的检测成为一个具有挑战性的问题。这表明,传统的传感器灵敏度有限,无法满足高性能侦察机器人的要求。另一方面,直接运动监测方法传统上基于加速器或陀螺仪。这些传感器大多体积庞大,结构设计复杂,不适合应用于小型化和柔性侦察机器人。因此,实现用于机器人应用的流量检测和/或运动监测的具有高灵敏度和简单结构的柔性传感器仍然是一个巨大的挑战。
最近,具有优异力学性能和传感性能的新型柔性材料和器件得到了广泛开发,其中以蜘蛛腿淤泥器官为灵感的基于裂纹的柔性应变传感器因其在小应变下的高灵敏度而备受关注。因此,它可能是构建基于悬臂结构的敏感机械传感器的一个非常有前途的候选者。基于裂纹的传感器主要有两种裂纹模式,即网络裂纹和通道裂纹。网络裂纹模式的特征是随机排列的短裂纹和孤立裂纹,通常导致传感器灵敏度较低的大应变范围。相反,通道裂纹模式的特征是规则取向的长裂纹,通常在小应变下导致超高灵敏度。因此,通道裂纹图案在高灵敏度悬臂传感器的设计中非常需要。然而,由于固有脆性传感材料中通道裂纹制造的常用预过载方法,或传感层和柔性基板之间的界面减弱,传感器的循环稳定性总是受到影响。尽管在克服基于裂纹的传感器的这些限制方面已经取得了一些突破,但使用了复杂的制造工艺或与微机电系统兼容性差的材料。因此,设计具有高循环稳定性和小应变下超高灵敏度的基于裂纹的应变传感器仍然是一个挑战,这对于设计用于小型和柔性侦察机器人中的流量检测和/或运动监测的机械传感器是必要的。
本文亮点
1. 本工作提出了一种基于疲劳载荷的通用而简单的策略,该疲劳载荷具有高达~1.2×107%的超大累积应变,而不是传统的准静态预过载方法,以在不牺牲循环稳定性的情况下在传感层中引入沟道裂纹。
2. 所开发的柔性应变传感器在微小应变(<3%)下表现出高应变灵敏度(应变系数=5798)、高循环稳定性(15000次循环)和低应变检测极限(0.02%)。
3. 利用基于疲劳裂纹的应变传感器开发了一种片状机械传感器,用于实现环境感知和微运动检测的多功能应用,具有宽传感范围(0.93–11.93 m s−1)和快速响应时间(0.28 s),适用于两栖应用。
图文解析
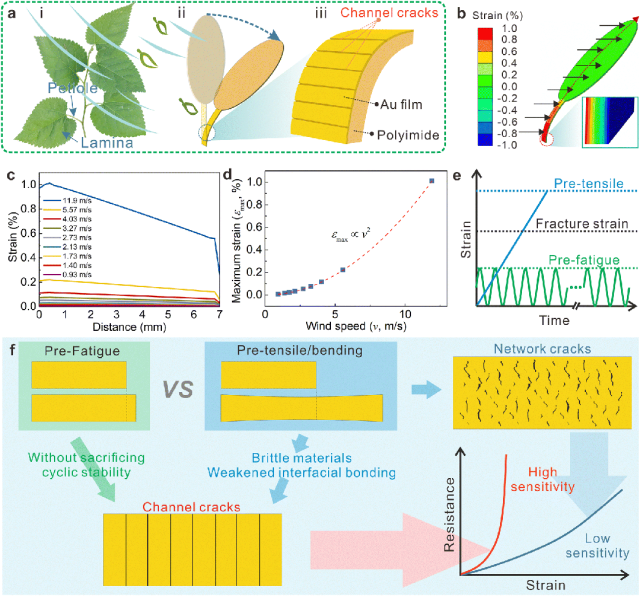
图1. 叶片式传感器的设计理念。(a) (i)由叶柄和在风中摆动的叶片组成的叶片,(ii)具有人造叶片和人造叶柄的类叶机械传感器的结构示意图,当风压来临时,人造叶柄充当悬臂梁,(iii)引入人造叶柄表面的应变敏感层的示意图。(b) 在11.9 m s−1的风速下,通过有限元模拟获得了叶片状传感器沿对称轴的应变分布。(c) 在不同风速下,传感器表面上的拉伸应变是沿着传感器对称轴的距离的函数。(d) 传感器表面上作为风速函数的最大拉伸应变。(e) 预拉伸和预疲劳的加载过程示意图。(f) 预过载和预疲劳之间的比较,导致不同的裂纹模式和传感性能。
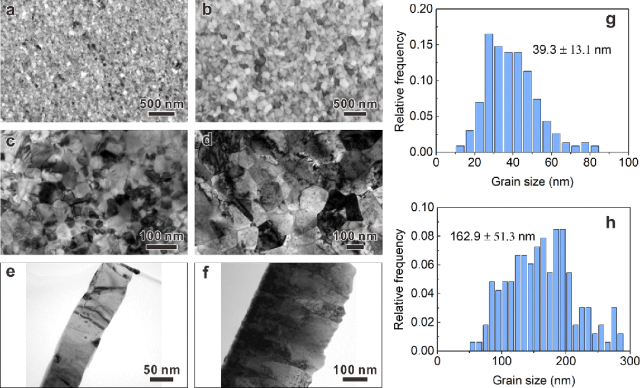
图2. 沉积态Au薄膜的微观结构表征。厚度为(a)90 nm和(b)930 nm的沉积态Au膜的表面形态的SEM图像。厚度为(c)90 nm和(d)930 nm的沉积态Au膜的平面内TEM形态。厚度为(e)90 nm和(f)930 nm的Au膜的横截面TEM形态。厚度为(g)90 nm和(h)930 nm的沉积态Au膜的晶粒尺寸的统计。
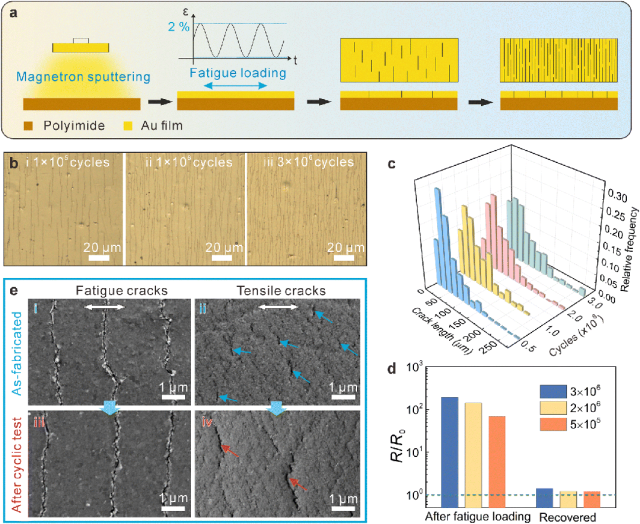
图3. 基于疲劳裂纹的应变传感器的制造和表征。(a) 基于疲劳裂纹的应变传感器的制造工艺。(b) 三个不同预疲劳循环后传感器表面裂纹形态的LSCM观察结果。(c) 在不同预加载循环下制造的疲劳裂纹的裂纹长度的相对频率分布。(d) Au膜在三个不同的预疲劳循环后的归一化电阻和静置24小时后的恢复电阻,R0是膜在预疲劳前的初始电阻。(e) 制造后的(i)疲劳裂纹和(ii)拉伸裂纹的SEM观察,以及循环稳定性测试后的(iii)疲劳裂缝和(iv)拉伸裂纹。指示装载方向的水平双头箭头。
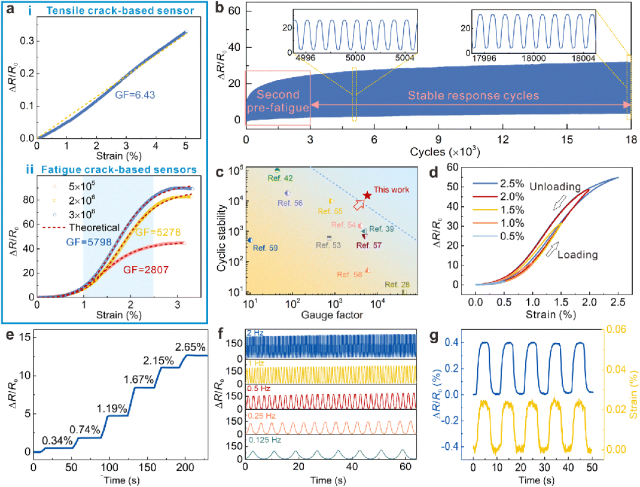
图4. 传感性能。(a) (i)基于拉伸裂纹的传感器和(ii)以三个不同的预疲劳循环制造的基于疲劳裂纹的传感器的电阻响应。(b) 基于疲劳裂纹的传感器的循环稳定性。(c) 基于疲劳裂纹的应变传感器与其他基于裂纹的传感器的传感性能比较(用于检测<3%的小应变)。(d)不同峰值应变下传感器的磁滞曲线。(e) 基于疲劳裂纹的传感器在阶跃加载过程下的电阻响应。(f) 基于疲劳裂纹的传感器在不同加载频率下的循环阻力响应。(g) 传感器在0.02%的极小应变下的循环响应,显示了传感器的检测极限。
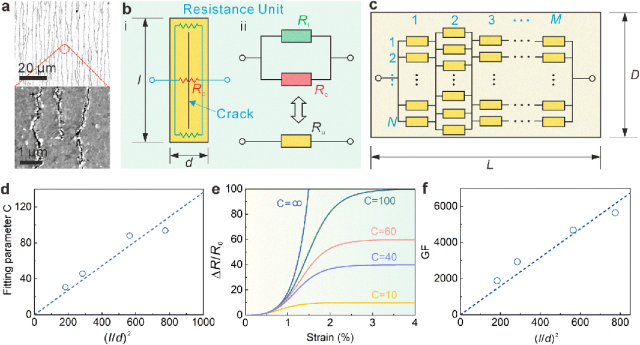
图5. 基于疲劳裂纹的传感器的传感机理。(a) 疲劳裂纹形态。(b) (i)感测层的基本电阻单元的结构示意图和(ii)其等效电路。(c) 整个感测层的电阻网络由Ru组成。(d)拟合参数c作为(l/d)2的函数。(e) 从方程(4)中获得的理论电阻曲线,固定的ε0和μ以及不同的C值。(f)传感器的应变系数作为(l/d)2的函数。
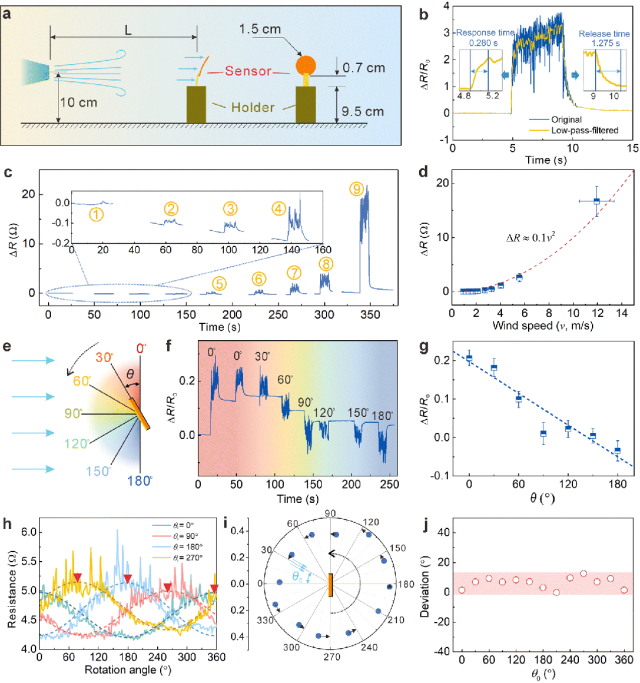
图6. 演示叶片状传感器的气流检测。(a) 气流检测实验装置的示意图。(b) 当风源打开几秒钟然后关闭时,传感器的电阻响应,插图显示传感器的响应时间和释放时间。(c) 原始传感器对传感器和风源(L)之间的距离变化的九个不同位置处的气流的响应。(d) 传感器的平均电阻响应作为风速的函数。(e) 气流方向检测实验装置的顶视图示意图。(f) 原始波动和(g)平均传感器对不同气流方向的响应。(h) 传感器的电阻响应是其连续旋转角度对四个不同风向的函数。(i) 极坐标图上不同实际风向的实测风向(θ0)。在测量过程中,传感器如虚线箭头所示旋转。极性半径表示电阻变化,比例尺如左轴所示(单位:Ω)。黑色小箭头表示实验确定的风向与实际风向之间的偏差。(j) 测量风向与实际风向的偏差,红色阴影区域显示误差带。
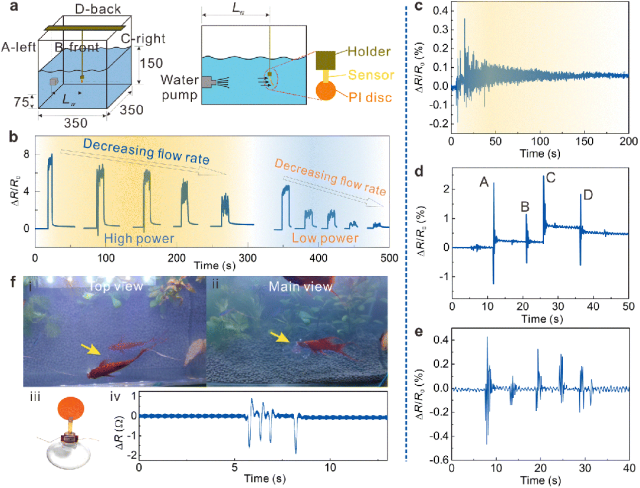
图7. 叶片状传感器的水流检测演示。(a) 水流检测实验装置的示意图。(b) 改变传感器与水泵之间的距离(Lw)和改变水泵功率时的传感器响应。水下传感器响应:(c)用钢尺划水,(d)从不同方向拍打水箱,(e)在“a”侧轻轻敲击水箱五次。(f) 当传感器被鱼轻轻触摸时,传感器在鱼缸中的响应。
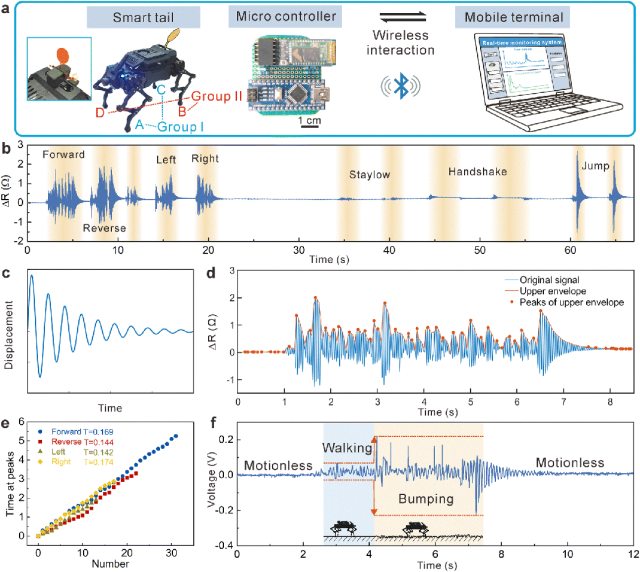
图8. 演示类叶传感器的微运动监测。(a) 实时微运动监测系统的图示,该系统具有连接在四足机器人背部的叶子状传感器,用作智能尾巴,用于数据收集和传输的电路板,以及用于实时数据可视化和分析的笔记本电脑上的用户界面。(b) 机器人进行七种不同动作时的传感器响应。(c) 具有弱粘性阻尼力的自由阻尼振动系统的典型振动曲线。(d) 当机器人向前移动时,叶状传感器的放大电阻响应,提取原始信号的上包络和上包络的峰值。(e) 上包络峰值的时间作为机器人四个不同动作的峰值数量的函数。(f) 机器人从平坦地面行走到粗糙地面时实时监测系统的传感器响应。
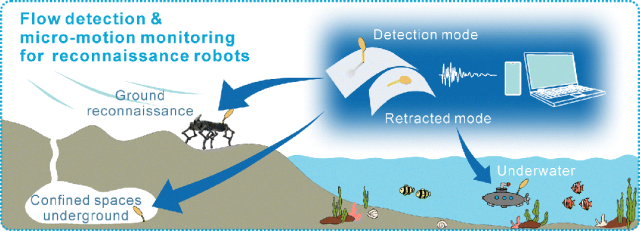
图9. 类叶传感器的潜在应用场景图。
