 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



现在的智能机器人可以通过视觉和触觉准确识别许多物体。触觉感应为机器人提供了丰富且精细的感官,从而识别以前处理过的物体,基于触觉的物体识别已经引起了公众的关注。然而,由于现实生活中物体在形状、尺寸和其他细节上的复杂性,以及抓取时方向和位置的不确定性,机器人抓取识别在现实场景中极具挑战性。
近日,清华大学团队提出了一种包含热感的新型机器人物体识别方法,以实现准确的物体识别,并在区分日常生活中的各种物体方面取得良好的泛化能力。该项研究成果发表于《Applied Physics Reviews》。
人类拥有多种不同类型的触觉,其中之一就是热感觉。由于具备热感觉这种触觉,我们能够感知到风的吹拂以及冷与热的变化。此外,人类还能根据不同材质产生的不同冷却感来区分不同的物质类型。
在这项工作中,研究人员提出了一种包含热感的新型机器人物体识别方法,以实现准确的物体识别并在区分日常生活中的各种物体方面取得良好的泛化能力。团队通过在仿人机器人手的指尖和手掌上配备的多模态触觉传感器获取时空触觉信号。仿照人类皮肤中的快速适应(FA)受体和慢速适应(SA)受体,具有多层感应结构的触觉传感器能够感知在与物体接触过程中获取的动态和准稳态信号。
为了能够准确识别物体的温度,研究小组仿照人类皮肤中的快速适应(FA)受体和慢速适应(SA)受体,创建了一种分层传感器,表面是材料检测层,底部是压力敏感层,中间的多孔层对热变化敏感,能够感知在与物体接触过程中获取的动态和准稳态信号。
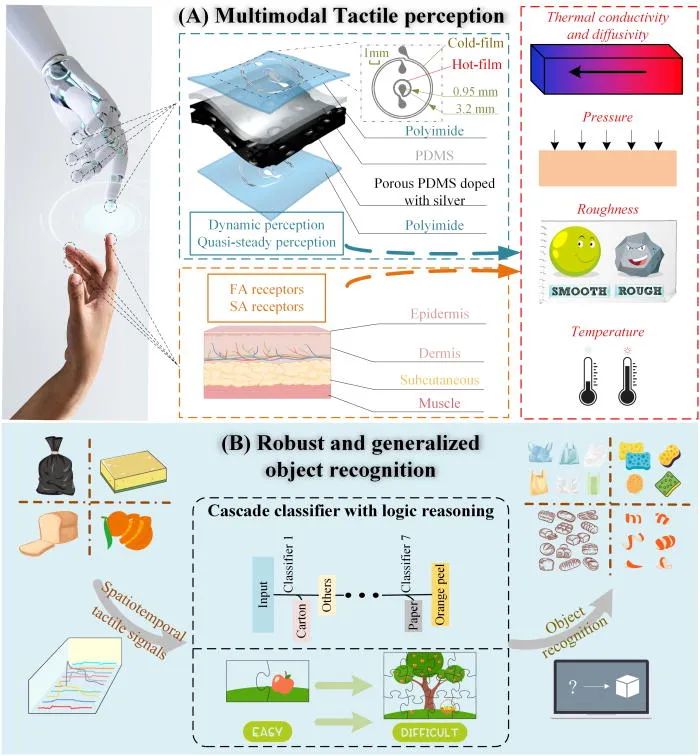
将这种传感器与一种高效的级联分类算法搭配使用,该算法按照从易到难的顺序排除物体类型,从空纸盒等简单类别开始,然后再到橘子皮或布屑,最终完成物体的识别。
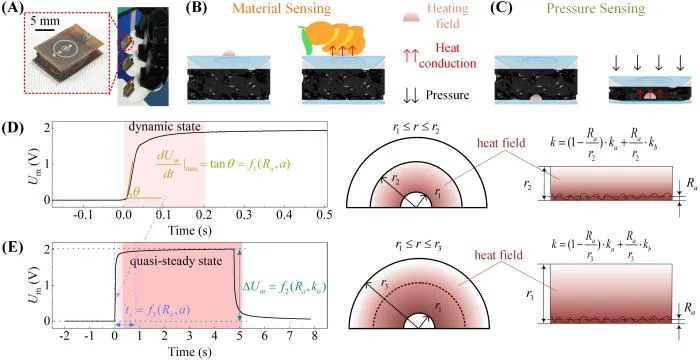
装备在机器手指上的触觉传感器用于实现对物体接触过程中的详细感知。顶层感知层采用两个同心铂热敏电阻器的结构,通过电热加热热薄膜,传感器可以根据物体的热特性和表面粗糙度检测不同材料。底层感知层设计用于检测接触压力变化,通过材料的弹性变形来实现压力感知。
识别实验
为了测试其方法的识别能力,研究小组搭建了一个智能机器人触觉系统,用于进行垃圾分类。这个机器人能够捡起一系列常见的垃圾,包括空纸盒、面包屑、塑料袋、塑料瓶、餐巾纸、海绵、橘子皮和过期药品,并将其分类至可回收垃圾、食物残渣、有害垃圾和其他垃圾的容器中。
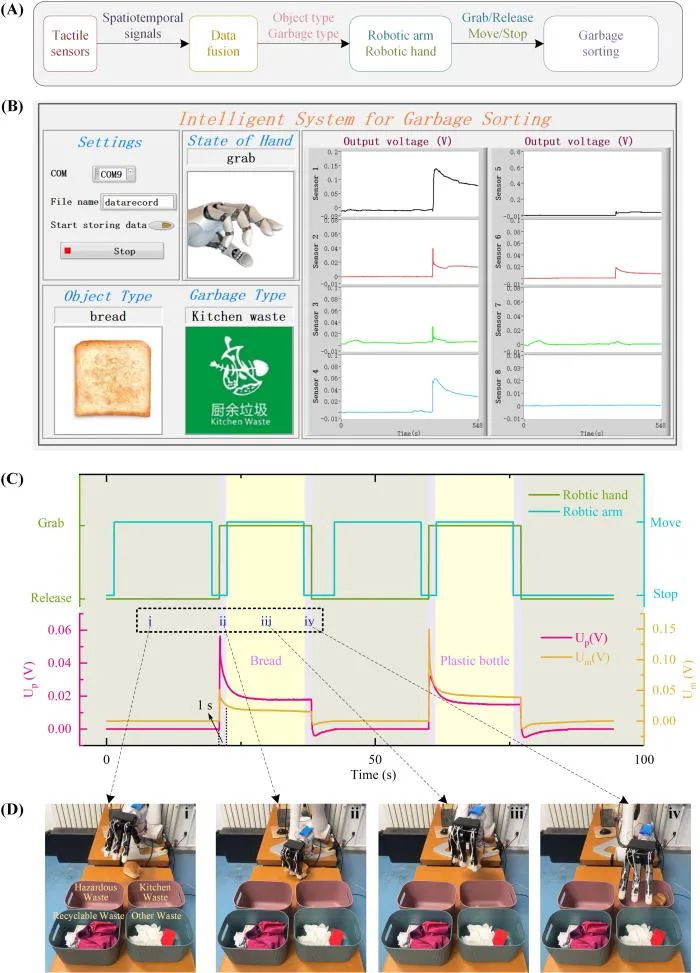
在识别未见过的物体时,智能机器人的分类准确率也能达到98.85%。这种成功的垃圾分类行为可以大大减少现实生活中的人力劳动,并为智能生活的未来发展提供了更多的技术支持。
除了触觉感知,视觉、听觉和嗅觉也能为机器人感知周围环境提供丰富信息。具有多模态感知能力的机器人能够执行更复杂的任务,如物体处理、工件组装、协助照顾病人等。未来将结合触觉感知与其他感知,赋予机器人更强大的感知能力和更多的智能,这将在日常生活的许多领域发挥重要作用。
