本文分析伺服系统中永磁同步电机转动惯量在线辨识的方法,主要分析了模型参考自适应方法的原理,指出该原理目前存在的问题,辨识速度和辨识精度无法兼顾、电流采样噪声干扰等问题以及解决方法,介绍自适应增益系数的优化、加权递推平均滤波等方法,对在线辨识转动惯量的稳定性和精度上有一定的帮助。
伺服系统的负载惯量是影响系统动态性能的重要参数,一般来说,对于一个电流环闭环特性已经确定的伺服系统,系统折合负载惯量的大小决定着速度环的频域宽度。在伺服控制参数整定过程中,当系统的负载惯量发生变化时,必须根据其实际惯量大小对伺服速度环、位置环控制参数进行重新整定。在工业应用中的某些场合,负载惯量在运行过程中会不断发生变化,如机器人手臂在运动过程中,随着臂长的变化,惯量随之变化,若不能根据惯量变化实时调整控制参数,则系统系统的控制性能将会受到影响。虽然通过数学分析计算可以得到伺服系统的惯量结果,但由于伺服系统的实际运行状态差别较大,有时无法得到伺服系统各组成环节全部参数,且伺服系统中各种因素相互耦合和影响,因此通过计算得到伺服系统惯量求取方法已失去应用价值。因此,必须通过在线辨识的方法实时求取伺服系统的电机转动惯量。
目前一般电机转动惯量在线辨识技术有最小二乘法、卡尔曼滤波辨识法、扰动转矩观测法以及模型参考自适应法(MRAS)等,使用递推最小二乘法对直流电机的电机转动惯量辨识,使用遗忘因子的最小二乘法克服辨识波动问题,采用了扩展卡尔曼滤波来辨识电机转动惯量,但需要复杂的计算和非线性滤波,采用复合扰动观测法和自适应扰动观测法。而最常见的是MRAS方法,其具有计算简单、便于使用的优点,国内外对此作了很多研究来解决该方法存在的缺陷。
本文针对MRAS存在的增益系数无法兼顾动态性和稳定性问题、输入参数的噪声干扰问题对应的解决原理和方法分别进行的阐述。
永磁同步电机的数学模型
交流伺服电机数学模型是一个多变量、强耦合复杂的非线性系统。为了对该复杂系统实现较高性能的控制,需要将三相静止坐标系下的数学模型变换到两相旋转坐标系下,进而分别对励磁电流分量和转矩电流分量分开控制,即控制电机的励磁和转矩。以下直接给出交流伺服电机在两相静止坐标系下的数学模型:
基于模型参考自适应的转动惯量辨识
模型参考自适应主要分为两部分:参考模型和可调模型。这两个模型有相同的输入,比较两者的输出,通过朗道辨识迭代和波波夫超稳定理论得到的自适应规律,使可调模型的输出快速而又稳定的接近参考模型的输出,即可得到辨识结果。如图1所示:

固定自适应增益系数法
将方程3进行离散化得到:

其中β越辨识收敛越快,越小辨识精度越高。兼顾二者可取合适固定值,即可辨识出转动惯量。
可变自适应增益系数法
由上所述可知,值的选取对转动惯量的辨识影响至关重要。若选取一个固定的值,兼顾到收敛速度和辨识精度,但其实是两方面都没有达到最优的效果。
为此,可采用自适应增益系数算法,方法一,式(10)中在输入偏差ε(K)较大时采用较大的β,输入偏差ε(K)较小时采用较小的β,可采用如下推导:
其中:βmi为辨识精度最佳时的增益系数,βma为辨识收敛最快时的增益系数,ej为转动惯量真实值与辨识值之间差值的标幺值,范围在[0,1]之间。
对于真实负载转动惯量变化速度快,变化范围大时,可采用方法二,建立辨识的自适应增益系数与当前辨识结果的关联。设当前为第k个辨识周期,那如下表示前n+1个转动惯量辨识值:

建立评价自适应增益系数的评价标准:

其中Jm为电机本体转动惯量,S为评价标准结果。
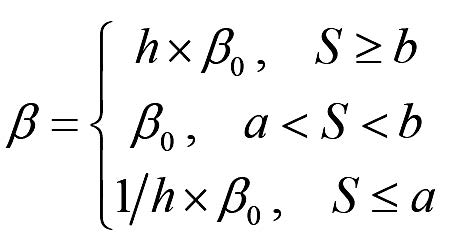
根据式(12)的评价标准,可以得到如下的分段函数:
其中βo为固定基准增益系数,h为比例缩放系数,a和b为负载转动惯量与电机本体转动惯量比值评价结果范围。
当辨识结果还不稳定时,自适应增益系数为基准增益系数的h倍,可加快辨识收敛速度;当辨识结果稳定时,自适应增益系数为基准增益系数的1/h倍,让其回归至中间稳定区间范围,且维持不变;
加权递推平均滤波法
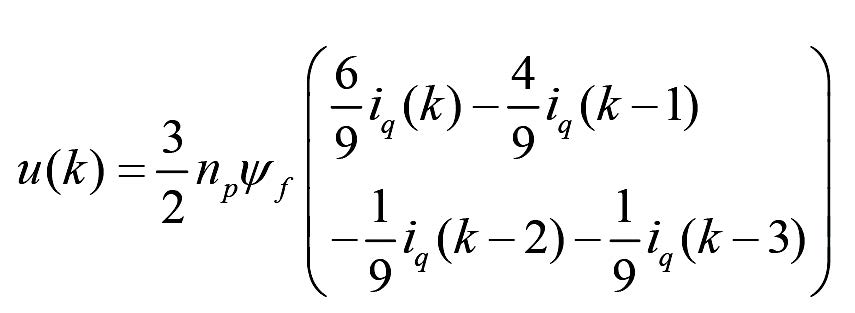
转动惯量辨识的精度还取决于输入量的精度,其中一个输入参数是q轴电流。q轴电流来源于三相电流的采样,在保证电流采样的精度的同时,难免存在噪声干扰。采用滤波的方法可以削弱噪声的影响,提高辨识精度。递推平均滤波是一种典型的滤波方法,可以有效的滤波高频噪声干扰,但也会影响灵敏度,采用加权的方式,不同时刻的输入参数采用不同的加权值,越靠近现时刻的加权值越大。
如下:
如上的加权值6/9、2/9、1/9可以去根据所需的灵敏度和噪声滤波效果来调整。
仿真结果
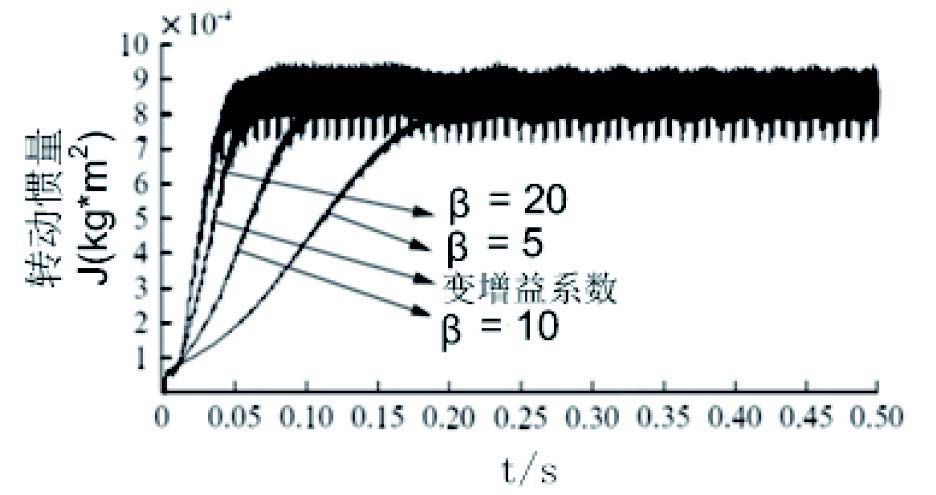
按上述分析,在MATLAB上仿真研究,固定自适应增益和可变自适应增益得到的转动惯量辨识的结果差别如下图2和图3:
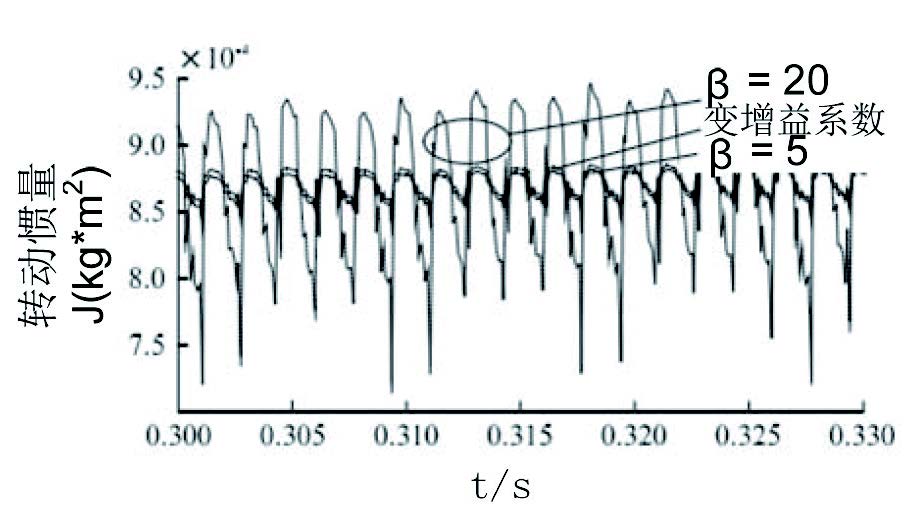
图2 固定增益和可变增益辨识整 体对比 图3 固定增益和可变增益辨识 局部对比
从上图中可知,固定自适应增益法情况下,增益系数越大,辨识收敛速度越快,辨识波动越大。可变自适应增益法在辨识收敛速度和辨识精度上都有较大的改善。
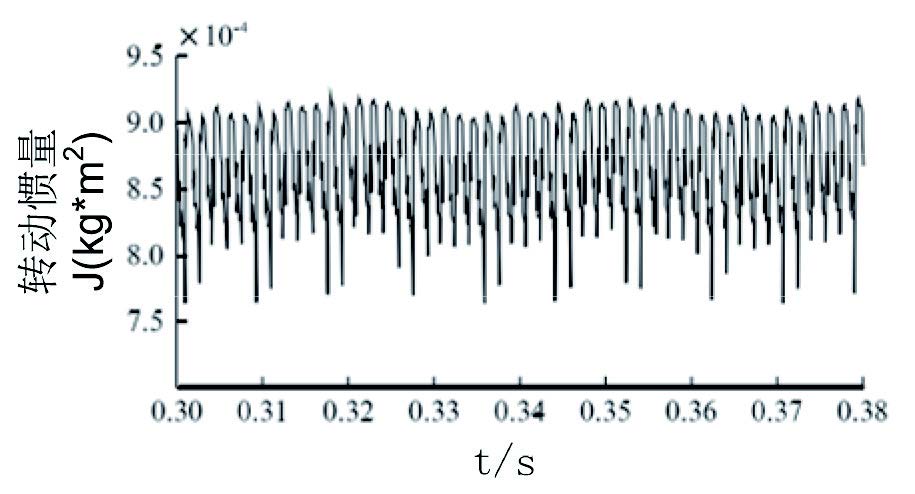
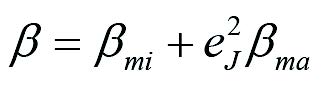
图4 未滤波辨识结果 图5 加权递推平均滤波辨识结果
自适应增益系数在20情况下,从图4和图5对比可知,对电流采样值加入加权递推平均滤波后,图5明显比图4的稳态波动要小,转动惯量辨识精度提升明显。
可变自适应增益转动惯量辨识结合加权递推平均滤波法,图6为转动惯量放大5倍后的辨识结果,辨识误差小,辨识收敛速度快。
图6 惯量放大5倍
小结
本文分析了模型参考自适应方法在电机转动惯量在线辨识中的原理,并在此基础上给出了固定自适应增益系数、可变自适应增益系数以及加权递推平均滤波的原理说明,这些原理和方法能有效辨识出转动惯量,并能在一定程度上提高辨识稳定性和辨识精度。
 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录