 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



警钟长鸣,屡屡发生的机械伤害事故为什么机械伤害事故屡屡发生?造成事故的原因又是什么呢?能避免吗?
研究显示,造成机械伤害事故的大部分原因是机械设备不够完好、安全防护措施缺失。在突发情况发生时,寄希望于操作人员能及时作出反应,从而避免事故的发生, 显然是不现实的。
机械运动控制原理
运动控制系统一般由伺服电机、驱动器、运动控制器和上位机组成。素来以精确的力、速度、位置控制和高动态响应而著称;运动控制系统是一项集成了计算机技术、 电力拖动、检测技术、控制理论以及机械理论等多学科的 技术应用;运动控制系统是当今生产活动高效率和高质量的保证。但机器设备安全保护和人身安全保护这两大问题一直困扰着各行各业。
安全运动控制系统
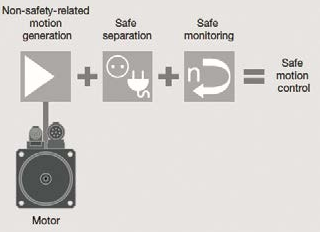
为了更好地解决机器设备安全保护和人身安全保护问题,很多行业开始逐渐引入一套全新的运动控制系统— 安全运动控制系统。安全运动控制系统是一种更为先进的安全生产技术,已经出现在了很多行业标准、产品及应用 上,并逐步成为工厂设备功能安全的重要组成部分和提升生产效率的重要手段。
为什么安全运动控制相对于传统运动控制更有优势? 为什么安全运动控制能够更好地解决机器设备安全保护问题和人身安全保护问题?
传统运动控制系统VS安全运动控制系统
相对于运动控制系统,安全运动控制系统是在安全标准的框架下,通过检测机制及诊断范围、共因、元件可靠性、系统设计等方面措施,来应对随机硬件失效和系统性失效风险,能在有效的保护人和机器的同时,实现生产效 率和质量的再次提升。
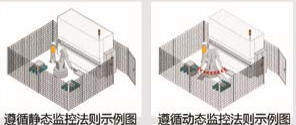
安全运动控制系统和传统运动控制系统最大的区别在于,传统的运动控制系统只有完全静止后才安全,因此需要外围安全元件(比如安全继电器)去监控和保证运动完全停止,遵循静态安全监测法则。而安全运动控制系统则不仅仅保证运动停止,还更加注重运动对人和机器的无伤害性,遵循动态安全监测法则。因此,相较于传统运动控 制系统,安全运动控制系统能够在确保安全的前提下,更好的提升设备的效率。
更强大的安全运动控制系统
为了满足安全控制的需要,皮尔磁提供了Protego S系 列的S1、S2二种类型的运动控制安全卡, 可达到PLe和SIL3 的安全等级。优良的品质保障人员安全,高效的系统提升机器效率。
Protego S系列安全运动控制系统能够高效率地为客户的生产保驾护航。
安全隔离
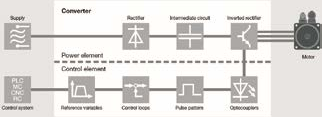
伺服驱动器分为电力回路和控制回路两部分。其中,电力回路主要由整流、电容滤波和逆变组成;控制回路主要由指令或参考变量、闭环控制、PWM调制脉冲组成。另外,电力回路和控制回路都是通过光电耦合器隔离的。
把伺服驱动器的结构图转化为信号路径图,如下图所示。在这个图中,光电耦合器安全禁止、设定值或参考值开关和控制使能被用做安全运动控制的安全隔离。由于实施难度、驱动器技术等原因,通常不用电机接触器作为安全隔离的一部分。由于电力回路中的大电容的放电时间很长, 通常在5-10分钟以上,因此供电主接触器的断开是无法保证伺服电机是断电的。
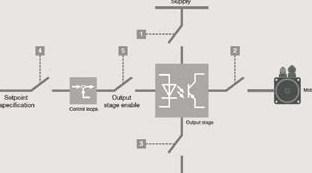
通常情况下,只有安全检测和控制功能引发故障时, 才会触发安全隔离。
1、电力回路供电主接触器,用于隔离驱动器的输入供电;
2、电机接触器,用于隔离电动机的输入供电;
3、光电耦合器安全禁止器,光电耦合器用于隔离电力回路和控制回路;
4、设定值或参考值开关,设定值将被设置为0;
5、控制使能,控制光耦的信号将被禁止。
安全运动检测和控制
安全检测和控制不能够按照传统的检测和控制去理解,他们最大的区别在于是否能有效应对失效风险方面。 在实施过程中,传统的检测和控制是不考虑检测机制及诊断范围、共因、元件高可靠性、安全系统设计等方面的。
在标准EN/IEC 61800-5-2中列出的安全功能中,需要对运动学的加速度、速度和位置进行安全监控。由于驱动器中通常使用的是非安全相关部件,因此实施过程中,除了监控驱动器的运行和状态外,还需要结合传感器技术, 比如安全编码器。
安全运动控制需要的不仅仅是安全检测,更需要对运动的安全控制。最常见的安全控制是安全运动限制,安全限制有三种方式:固定值式、设定值选择式和动态修改式。固定值式是通过配置软件,事先设定好限定值,在运动中,限定值是不可改变的。选择式则是多个固定值,在 运行中可以通过安全IO或安全总线切换固定值。动态修改式 是运行中可修改的,比如在上次提到的机械手和人的安全 示例中,安全功能根据人和机械手的距离进行安全降速, 人距离机械手的危险距离越近,机械手的速度越慢。
为了满足安全控制的需要,皮尔磁提供了驱动器 PMCprotego D系列集成Protego S1/S2安全卡,提供了 SS1、SS2、SOS、SLS等安全功能, 帮助客户在保证安全生产的同时,还能提升生产效率。
感谢皮尔磁(中国)提供本文内容。
