 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。



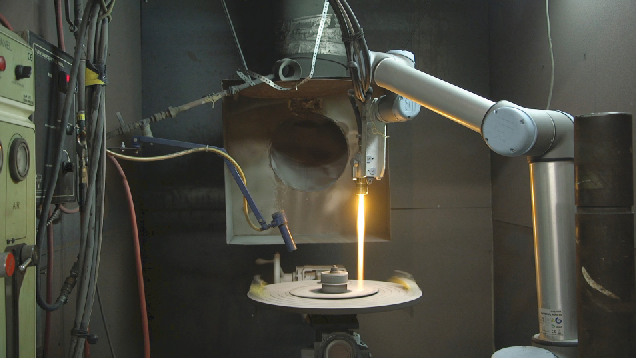
超音速火焰喷涂 (High Velocity Oxygen Fuel,HVOF)是一种热喷涂涂层工艺,能改善或恢复零部件的表面性质或尺寸,并通过增强耐腐蚀性和耐磨性来延长设备寿命。零部件的喷涂通常需要3至4小时,喷涂间隔为1至2分钟,然后是2分钟的冷却时间,是用气动冷却器来提供冷空气进行冷却。
Aircraft Tooling Inc.(ATI)公司的热喷涂主管Juan Puente表示,他们在进行航空零部件的涂覆时需要一个坚固的系统,它必须足以应对超音速火焰喷涂(HVOF)和等离子喷涂的灰尘和热量。起初他并不认为外观精致的UR系统能超越传统的工业机器人。
“传统机器人的成本太高了。铸铁材质使其过于笨重,我们不能轻松地移动它们;它们很难编程;以及所有必需的安全保护——这些都无法在我们的小型喷涂室中无法实现。”后来他在YouTube视频中偶然发现了UR。
Puente解释道:“UR10机器人能实现喷涂所需的工作距离,成本约为其他方案的一半。它非常人性化,且容易便携。由于其协作安全功能,我们不需要对其进行过多限制。”UR机器人由于其内置的安全系统而被归类为协作机器人(cobot),机器人手臂在遇到其路径内的物体或人时会自动停止操作。
喷涂室是一个开放的隔间,可以使用机器人触摸屏上的箭头键或通过抓住机器人手臂并沿着路径关键点来移动以进行编程。
尽管Puente欣然承认UR10机器人“赢得了他们的心”,但ATI仍然犹豫不决,他们担心机器人在喷涂室的炎热多尘环境中是否能可靠地运行。
出乎意料
Puente解释道:“我们非常惊讶。实际上,我认为机器人很难‘忍受’这种恶劣环境。这些粉末涂料中有一些是碳化钨,这是硬质金属涂层。如果它渗入机器人的轴承,很可能会破坏它们。”于是ATI打开了UR10的密封件,却发现轴承完好无损。
“运行了三年以后,这里居然没有任何粉尘颗粒。”Puente说,并补充说喷枪的后座力是另一个问题。“我们很紧张,因为后座力会使机器人绊倒或干扰伺服功能。但是机器人仍然保持在原位。”
UR机器人经销商Olympus Controls的自动化工程师Nick Armenta解释说,“我们经常看到机器人在恶劣的环境中运作,接管人类不想做的工作。许多人认为协作机器人很脆弱,但事实恰恰相反,这是一种非常耐用的机器人。它密封防尘,能适用于高温,在极端环境和洁净室中也能正常工作。”
维护方便
ATI的工作人员也惊讶地发现UR机器人不需要进行预防性维护。
“我们所做的只是为机器人手臂抹去灰尘并继续使用,”Puente 说,“并且不再需要额外的授权和服务协议。与我们研究的其他解决方案相比,这真的很不寻常,一切都包含在购买价格中。”
他说:“如果机器人存在任何问题并且仍在保修期内,如果我们没有库存,也能在第二天获得零件。”有一次客户的机器人通过更换机器人手臂中的关节,从而顺利地在同一天再次运行。

UR机器人可以通过机器人触摸屏上的箭头键进行编程,也可以抓住机器人手臂并沿着路径关键点来移动它。
ATI最初担心UR10机器人无法承受连接在手臂末端的喷枪的反座力。他们用尽可能高的压力对它进行了测试,但机器人仍能保持原位。
倒挂安装
ATI选择的UR10机器人是Universal Robots提供的三种协同机器人(UR3、UR5和UR10)型号中最大的一款。这些协作机器人以其有效载荷的公斤数命名,跨度从19.7英寸到51.2英寸。
Puente说:“我们之所以选择UR10是因为它的长度可以将其倒挂,这样就能在它下面行走。保持地板畅通对我们来说永远是一个优势。”他们现在使用两台UR10机器人,第三台机器人也正在安装。机器人的有效载荷和速度(39.4ips)对于ATI来说已经绰绰有余了。
Puente解释道:“这样的速度能确保以一定的速度进行涂层。我们的喷枪并不那么重,因此有效载荷不是问题。”
快速编程
ATI通过触摸屏对UR10机器人进行初始设置和编程,才耗费4个小时。“这是一个简单、用户友好的过程,而不是其他具有更复杂的多步骤编程接口的机器人,”他使用教学方法对UR10的喷涂路径进行编程,该方法允许用户抓住机器人手臂并通过直接插入机器人触摸屏的路径关键点来将其移动。“我们使用红色激光来准确标记我们希望机器人移动的位置。一旦设定了路径关键点,我们只需点击‘play’,机器人就会沿着那条路径移动。”Puente说。他期待接下来添加更复杂的应用任务。“我们正在试图增加一台摄像头,这样我们就可以让机器人对涂层部件进行质量检查,找到需要额外涂层的区域。我们可以用这些机器人做很多事情,现在只是探索的开始。”
Aircraft Tooling Inc.,
www.atirepairstation.com
Universal Robots USA Inc.,
www.universal-robots.com
