 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256
顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
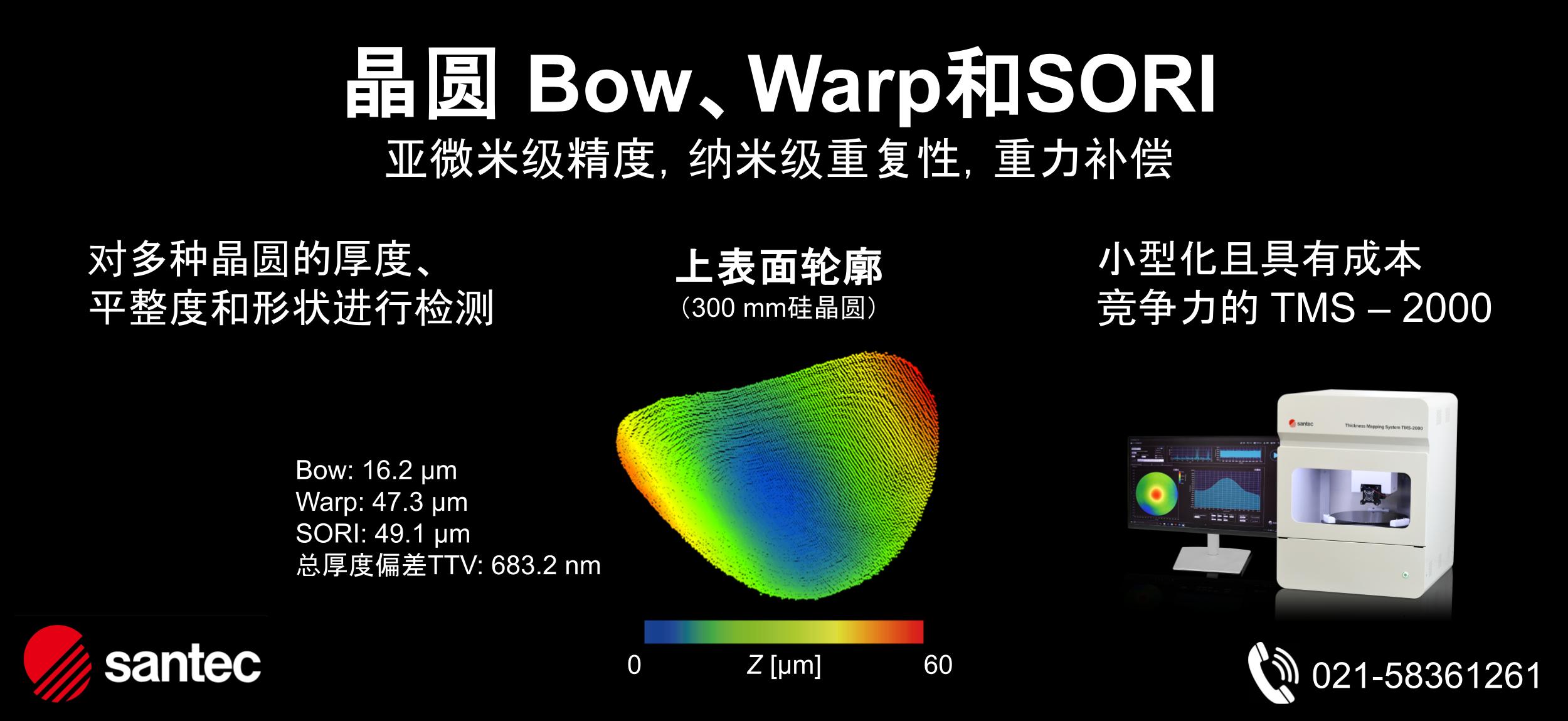


智能制造技术无疑是世界制造业未来发展的重要方向之一,它是在现代传感技术、网络技术、自动化技术、拟人化智能技术的基础上,通过智能化的感知、人机交互、决策和执行技术,实现设计过程、制造过程和制造装备智能化。目前全球智能制造发展的典型应用包括:以3D打印为代表的“数字化”制造技术崭露头角、智能制造技术创新及应用贯穿制造业全过程、世界范围内智能制造国家战略空前高涨。那么对于传感器领域来说,智能制造到底带来了哪些机遇呢?本文主要从以下几个方面进行介绍。
用视觉传感器实现零件二维、三维尺寸的高精度测量
高精度测量一般分为二维尺寸测量与三维尺寸测量,前者一般采用线阵CCD扫描测量系统,它主要由线阵CCD相机、运动工作台、控制电路及线光源等组成,其扫描测量原理如图1所示。当被测零件放置于运动工作台上,随工作台一起以向下方行进,零件未进入相机视场时,线光源所发射光线直接通过光学成像系统成为一帧灰度值较高的背景图像;当零件进入相机视场时,零件遮挡光线使得采集图像含有零件轮廓信息,将所有输出图像按采集的先后关系进行拼接,即可得到完整的高分辨率零件图像,通过图像处理得到零件的二维几何尺寸。
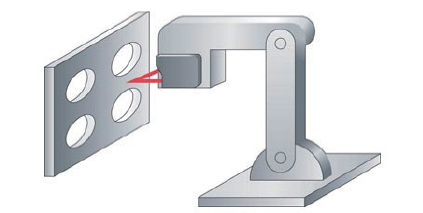
图1 线阵CCD扫描测量原理
对于三维测量,一般会采用激光扫描仪原理,它是一种十分准确、快速且操作简单的仪器,且可装置于生产在线,形成边生产边检验的仪器(图2)。激光扫描仪的基本结构包含有激光光源及扫描器、受光感 ( 检 ) 测器、控制单元等部分。激光光源为密闭式,较不易受环境的影响,且容易形成光束,目前常采用低功率的可见光激光,如氦氖激光、半导体激光等,而扫描器为旋转多面棱或双面镜,当光束射入扫描器后,即快速转动使激光光反射成一个扫描光束。光束扫描全程中,若有工件即挡住光线,因此可以测知直径大小。测量前,必须先用两支已知尺寸的量规作校正,然后所有测量尺寸若介于此两量规间,可以经电子信号处理后,即可得到待测尺寸。
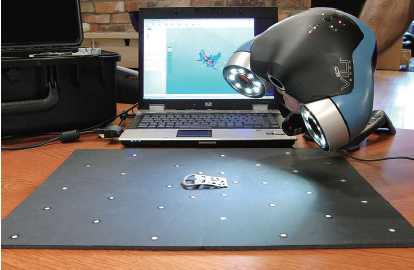
图2 三维激光扫描
各类机器人传感器层出不穷
为了检测作业对象及环境或机器人与它们的关系,在机器人上安装了触觉传感器、视觉传感器、力觉传感器、接近觉传感器、超声波传感器和听觉传感器,大大改善了机器人工作状况,使其能够更充分地完成复杂的工作。由于外部传感器为集多种学科于一身的产品,有些方面还在探索之中,随着外部传感器的进一步完善,机器人的功能越来越强大,将在智能制造领域做出更大的贡献。
触觉传感器
一般触觉传感器只用于感受有无接触,实际上是对正压力敏感的传感器。触觉传感器应具有以下特征:
空间分辨率为1-2mm;
阵列尺寸为每个指尖有 个接触敏感点(人的指尖有 个接触敏感点);
每个力敏元件的阀值灵敏度为 ;
稳定性、线性度和重复性好;
采取样率 ;
价廉、结实、类似皮肤。
常见的机器人触觉传感器为导电合成橡胶,即在硅橡胶中加导电颗粒或半导体材料(如银或碳)构成的导电材料。这种导电橡胶,加压时其体电阻的变化很小,但接触面积和接触电阻都随外力大小而变化。
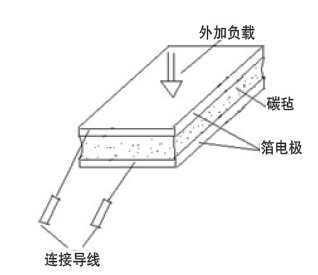
图3 碳毡传感器
其他触觉传感器如碳毡传感器,则是在两个极板间加入碳毡或碳纤维,从而构成压阻传感器(如图3所示)。当负载增加,碳纤维被挤压,导致更多的电接触,使电阻减小。
腕力传感器
腕力传感器安装在机器人末端和末端执行器之间,用于测量三维力和力矩。它通常比较小,两面为连接法兰,为整体铝材制造。典型的腕力传感器为直径 100mm,厚30mm,重340g。四个变形杆的四面都贴上应变片,变形杆对面上的应变片以差动方式与电位计电路相连。
超声波传感器
超声波传感器是利用超声波的特性,实现自动检测的测量元件。声波是一种机械波。声的发生是由于发声体的机械振动,引起周围弹性介质中质点的振动由近及远的传播,这就是声波。人耳所能听闻的声波其频率在20-20 000Hz之间,频率在20-20000 Hz以外的声波不能引起声音的感觉。频率超过20000 Hz的叫做超声波,频率低于20 Hz的叫做次声波。超声波的频率可以高达1011 Hz,而次声波的频率可以低达10-8 Hz。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。
为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。可以利用超声波传感器结合单片机来设计三方向(前、左、右)的超声波测距电路,为机器人了解其前方、左侧和右侧的环境提供一个运动距离信息。在机器人控制系统中,可用时间差测距法进行距离的测量,具体原理是:超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340 m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离。
机械制造领域需要更高精度的角度或角位移传感器
角度编码器是一种高精度的角位移传感器,因其具有直接输出数字量、响应快、精度高、抗干扰能力强、分辨率高、输出稳定等特点。角度编码器一般有两种基本类型:绝对式编码器和增量式编码器。前者是按照角度直接进行编码的传感器,可直接把被测转角用数字代码表示出来,根据内部结构和检测方式有接触式、光电式等形式。后者一般为光电码盘,结构形式如图4所示。光电码盘与转轴连在一起。码盘可用玻璃材料制成, 表面镀上一层不透光的金属铬,然后在边缘制成向心透光狭缝。透光狭缝在码盘圆周上等分,数量从几百条到几千条不等。这样,整个码盘圆周上就等分成n个透光的槽。除此之外,增量式光电码盘也可用不锈钢薄板制成,然后在圆周边缘切割出均匀分布的透光槽,其余部分均不透光。
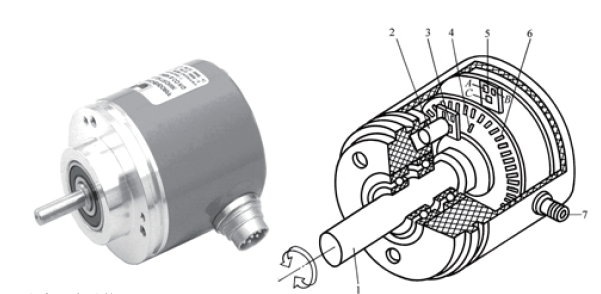
图4 光电码盘结构
在今天的智能制造领域里,其处理的信息包括信息采集、传输、处理三部分,即传感技术、通信技术、计算机技术。现代的计算机技术和通信技术由于超大规模集成电路的飞速发展,而已经充分发达后,不仅对传感器的精度、可靠性、响应速度、获取的信息量要求越来越高,还要求其成本低廉且使用方便,这也是当前制造领域传感器的一大变化。
